


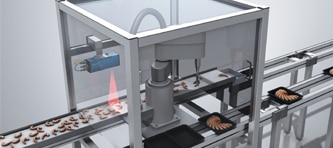




あらゆるサイズのベルトから簡単にピッキング
3D Belt Pick
ロボットの視野を拡大し、フォーカスを定めるカメラベースのソリューション。ロボットはSICKのカメラおよびビジョン技術を使用して、事前に定義された対象物の位置を特定して識別し、各パーツをどのように把持するかを自ら決定します。この場合、対象物ガイドなどの機械的構造は不要になります。測定と品質検査も可能です。接合プロセスなどでは、光学監視システムがこの方法で製品の位置と品質を点検し、プロセスを調和させます。
ロボットビジョンのためのロボットアプリケーションの選択肢
ロボットビジョン向けのSICK製品およびソリューション
SICK AppSpace




産業用画像処理

可動部品の3D点検を確実に実行する設定可能で直感的なセンサ
TriSpector1000

3Dスナップショット – 屋内で多目的に使用可能
Visionary-T

迅速で柔軟 – 検出距離が長い点検タスク向け
InspectorP65x

柔軟な光学系と頑強な筐体を備えたオールインワンビジョンセンサ
InspectorP63x

便利なセンサパッケージに含まれるインテリジェントな画像処理ソリューション
Inspector

柔軟な自動化を実現するカスタマイズされた3Dソリューション
TriSpectorP1000

ROCC技術により、小型筐体で優れた3D性能を実現
Ranger3

3Dスナップショット – 正確なファクトリーオートメーションのためのカラービュー
Visionary-S

より優れた3D性能を迅速に達成
Ruler3000

狭い取付スペースに対応可能な高性能2Dビジョンセンサ
InspectorP61x
導入事例 – SICKセンサブログのストーリー


ユニバーサルロボットとSICKは共に未来へ
有名なロボットスペシャリストであるユニバーサルロボットとSICKは、センサソリューションをリードする企業として、協働ロボット向けに2つの革新的なアプリケーションを開発しました。

ご質問がおありですか?

大手ロボットメーカー向けの特別なソリューション

We make Machine Vision Accessible
Customizable and easily configured 2D and 3D machine vision solutions – driven by SICK AppSpace
