
ユーザにとって使いやすく、柔軟性のあるパーツ位置特定向けセンサシステム
PLOC2D
標準ミドルウェア仕様のORiNによる通信可能
ORiNとは?
ORiN (Open Robot/Resource interface for the Network) は、ファクトリーオートメーションにおけるシステム向けに開発された標準ミドルウェア仕様です。この仕様の第2バージョンであるORiN2は、アプリケーション、センサ、制御装置、データスキームのための標準インターフェース (標準通信プロトコルを含む) を提供します。この仕様に基づいて作成されたプロバイダモジュール (拡張モジュール) は、様々なデバイスのために標準化されたアクセス方法を可能にします。これにより、工場内のITシステムの再利用性や信頼性を向上させ、システム開発期間を短縮し、より迅速なインプリメンテーションを実現することができます。
ロボット制御装置ではORiN互換アドインが使用され、共通のインターフェース仕様のPLCやカメラ、センサなどの外部機器を使用できるようになります。このアドインはプロバイダと呼ばれます。SICKはORiNのメリットを認識し、ロボット工学向けセンサの包括的なポートフォリオにロボットガイダンスシステムPLOC2D用のプロバイダのを追加しました。
ORiNのメリット

エンドユーザ向け:
- 簡単に構築可能なメーカーに依存しないシステム環境
- プロセス監視およびプロセスラインのリモートメンテナンスも可能

システムインテグレータ向け:
- ロボットガイダンスシステムPLOC2Dをロボットシステムに簡単に統合可能
- 標準ORiNインタフェースの使用による迅速なコミッショニング
- ORiNプロバイダ (DLLライブラリ) を使用した最小限のプログラミング作業

デバイスメーカーおよびOEM向け:
- 通信インタフェース開発時のプロセス短縮とテスト
- 他メーカとの連携
ソリューション事例
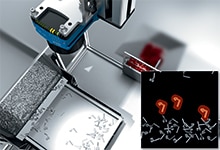
Anyfeederにおけるパーツ位置特定
Anyfeederは、返送やベルトの使用なしで、小型パーツの搬送および方向転換を行います。その際、小型パーツはランダムに配置されます。ロボットガイダンスシステムPLOC2Dは、その位置を迅速かつ確実に検出し、ORiNプロバイダを使用して位置データと回転位置をロボット制御装置に転送します。標準化されたORiNインタフェースは、PLOC2Dとロボット制御装置との完全な通信を保証します。取得した情報を使用して、ロボットは正しく配置されているパーツを把持し、次のプロセスに供給します。不適切に配置されているパーツは無視され、正しく配置されているパーツを把持したあと、パルス状の垂直振動で新たに方向調整されます。
製品
システムソリューション



対等な立場での共同作業
Robot Vision、Safe Robotics、アームエンドツーリングまたは位置フィードバックなど、いかなる分野においてもロボットはSICKのセンサにより、さらに高精度で知覚できるようになります。
詳細はこちら