







駆動技術の主役: HIPERFACE DSL®を搭載したモータフィードバックシステム
EES/EEM37
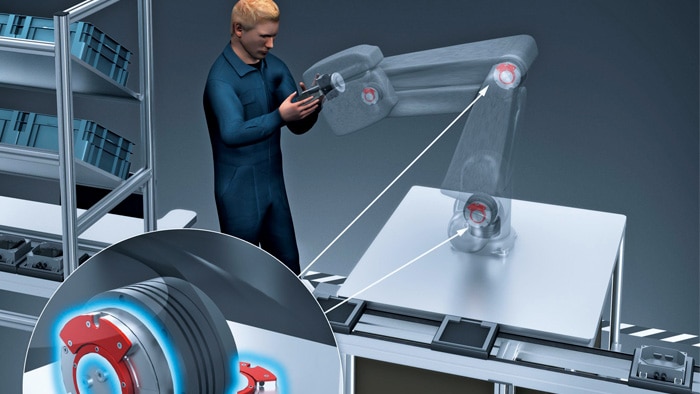
インサイダには、より多くの知識があります。ロボットのモータフィードバックシステムは、速度、位置ならびに駆動装置の状態に関するデータを駆動制御装置と制御装置に供給します。つまり、これらはロボットの全動作の知覚基盤を形成します。SICKのSmart Motor Sensorは、中心となってロボットと設備を効率的に制御するために必要なデータを提供します。
位置フィードバックのためのロボットアプリケーションの選択肢
関節アームロボット
コンパクトな形状によりモータフィードバックシステムEEM37は、関節アームロボットのすべてのバリエーションに適しています。HIPERFACE-DSL®技術により、Safe Roboticsなど、最適なヒューマンロボットコラボレーションを実現する新たなアプリケーションを実現できるようになります。
SCARAロボット
SEM70は、大型ホローシャフトおよびトルクモータ用のHIPERFACE®インタフェースを搭載したモータフィードバックシステムです。ホローシャフトは、SCARAロボットの内部ケーブル配線を可能にします。
リニアロボット (デカルト)
モータフィードバックシステムTTK50およびTTK70は、非接触測定原理で作動するため、摩耗がありません。絶対的な長さ測定システムの採用により、リファレンスランは必要ありません。このシステムは、測定距離が最長4メートルまでのリニアアプリケーションに理想的です。
パラレルリンクロボット
そのコンパクトな形状により、SKM/SKSは、パラレルリンクロボットなど非常にダイナミックなアプリケーションに適しています。すべてのバリエーションには、電子銘板とHIPERFACE®インタフェースが搭載されており、SIL2/PL dに準拠した安全要件を満たしています。
位置フィードバック向けのSICK製品およびソリューション




導入事例 – SICKセンサブログのストーリー

SICKのSmart Motor Sensorはハイウィン社 (HIWIN) のロボットのセキュリティを保証し、将来性を実現
リニア技術のエキスパートであるロボットメーカのハイウィン社では、ピックアンドプレースアプリケーション向けの新型6軸ロボットに、SICKのモータフィードバックシステムを採用しています。これによりスペースを節約し、将来の協働アプリケーションにも対応できる重さ5キログラムのロボットを実現しました。

ご質問がおありですか?

大手ロボットメーカー向けの特別なソリューション
HIPERFACE DSL® – 未来へのデジタル接続



SICKのSmart Motor Sensorsはユーザにとって、内部情報の提供源です。