
Användarvänligt och flexibelt sensorsystem för dellokalisering
PLOC2D
Kommunikation med standard middleware-specifikation ORiN möjlig
Vad är ORiN?
ORiN (Open Robot/Resource interface for the Network) är en standardspecifikation för mellanprogramvara som har utvecklats för system inom fabriksautomation. ORiN2, den andra versionen av denna specifikation, erbjuder ett standardgränssnitt för applikationer, sensorer, kontroller och datascheman inklusive standardkommunikationsprotokoll. Leverantörsmoduler (expansionsmodul), som skapas på grundval av denna specifikation, möjliggör en standardiserad åtkomstmetod för olika enheter. Detta kan förbättra återanvändbarheten och tillförlitligheten för IT-system i en anläggning, förkorta systemutvecklingstiden och uppnå snabbare implementering.
ORiN-kompatibla tillägg används i robotstyrningar så att externa enheter som PLC, kameror eller sensorer med en gemensam gränssnittspecifikation kan användas. Dessa tillägg kallas leverantörer. SICK har erkänt fördelarna med ORiN och har utökat sitt omfattande utbud av sensorer för robotik med en första leverantör för PLOC2D-robotstyrningssystemet.
Fördelarna med ORiN

För slutanvändare:
- En lättskapad, tillverkaroberoende systemmiljö
- Möjlighet till processövervakning och fjärrunderhåll av produktionslinjen

För systemintegratörer:
- Enkel integration av PLOC2D-robotstyrningssystemet i robotsystemet
- Snabb idrifttagning med hjälp av standard ORiN-gränssnittet
- Minsta programmeringsinsats med ORiN-leverantören (DLL-bibliotek)

För enhetstillverkare och OEMs:
- Processförkortning i utvecklingen av kommunikationsgränssnitt och tester
- Samarbete med andra tillverkare
Exempel på lösningar
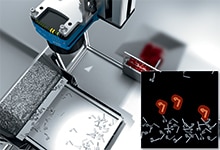
Detaljlokalisering i Anyfeeder
En Anyfeeder transporterar och vänder smådelar utan återföring eller användning av transportband. Samtidigt inriktas smådelarna godtyckligt. Robotstyrningen PLOC2D identifierar snabbt och säkert deras läge och överför positionsdata och vridläge via ORiN-leverantören till robotstyrningen. Det standardiserade ORiN-gränssnittet garanterar perfekt kommunikation mellan PLOC2D och robotstyrenheten. Med den förvärvade informationen kan roboten gripa rätt liggande delar och skicka dem vidare i processen. Felaktigt placerade delar ignoreras och riktas om med pulsade vertikala vibrationer, efter att de korrekt placerade delarna har plockats upp.
Produkter
Robotstyrningssystem



Samarbete i ögonhöjd
Det spelar ingen roll om det är Robot Vision, Safe Robotics, End-of-Arm Tooling eller Position Feedback - SICK-sensorerna ger roboten noggrannare uppfattningsförmåga.
Upptäck mera