個々のピースがすべて組み合わされて、完璧な絵が出来上がります。ただしここで具体的に取り上げるのはジグソーパズルではなく、fpt ロボット工学社の新しい特許取得済みグリッパと、SICKの3DカメラVisionary-Tの高度な連携です。自動化分野で実績を上げているfpt ロボット工学社が設計したSubito Connect Aセルは、ピックアンドプレースアプリケーション向けの全く新しいロボットセルであり、柔らかくて曲がりやすく形状が不安定な製品の、特に袋包装のロボットベースのピッキングでの隙間を埋めるセルです。技術的に高度な把持技術が備わっているため、吸引密閉ではなく、今日まで自動化が不可能である製品を、傷つけずに個片化して配置することができます。この製品の位置を確実に検出するには、それに適した「見る」システムが必要です。fpt ロボット工学社ではそれ用に、Visionary-T AGを使用しています。1年弱かけて着実に開発作業を行い、セルへのインプリメンテーションに際してSICKからの強力な支援を受けて生みさだれた成果は、非常に高いレベルに達しています。

以前より、形状と中身が様々な袋包装を自動化プロセスでピッキングすることは、特に難度の高い課題とされています。袋包装の確実な検出、把持とプレーシング向けにfpt ロボット工学社が開発したソリューションであるSubito Connect Aセルには、SICKのスマートな3DカメラVisionary-T AGが使用されています。ミュンヘンのAutomatica 2018で公開されたこのロボットは、コンパクトかつフレキシブルで移動型使用が可能であり、大きな手間をかけることなく手作業場、ロジスティクス作業場またはピッキング作業場に設置することができます。従って、このソリューションが市場でかなりの好反響を受け、ドイツの大きな玩具メーカーを含む複数の有力企業が既に関心を示したことは、さしたる驚きではありません。
カメラベースの把持技術領域での有能なパートナーを探すにあたって、その相手はすぐにSICKとそのロボットビジョン製品に決まりました。「Sensor Intelligence.」を掲げるSICKは極めて競争力の高いカメラソリューションとして、Visionary-Tの様々なバリエーションを市場に提供してきました。3Dカメラは競合他社の3Dスナップショットソリューションに類似していますが、コスト面で大幅に有利です。従って、とりわけ費用対効果が極めて高いことが、決定を下す際に重要な役割を果たしました。

3Dで得られる把持での優位性
とりわけ表面が柔らかくて曲がりやすく吸引密閉でない状態でのピックアンドプレースにおいて、具体的には包装されたパズルピースの把持とプレーシングにおいて、困難な点は多くの場合細部に潜んでいます。つまり、小さなステップを何回も踏まなければ、このような複雑で入り組んだアプリケーションを確実に進行させることはできません。これらのパズルピースをすべて正しく組み合わせて初めて、見事な共同作業の全体像が完成します。この点に関してfpt ロボット工学社とSICKは、双方の能力と専門知識を活かして協力し、画期的な成果を上げました。Subito Connect AセルへのVisionary-T AGのインプリメンテーションは、双方の全関係者の冷静沈着な姿勢、巧みな手腕、根気と極めて高いプロ意識の賜物です。1年弱にわたる密度の濃い共同作業の後、関係従業員はグリッパとカメラを上記の通り組み合わせて、連続生産に適した信頼性の高いレベルにまで引き上げることに成功しました。
セル内での連携
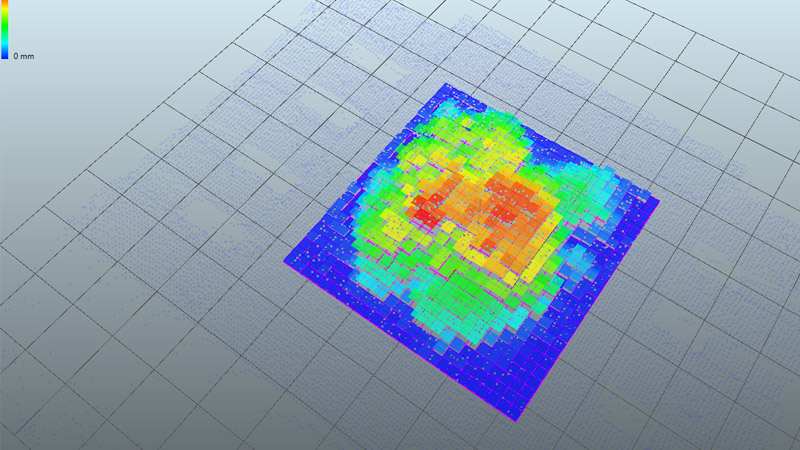
セル自体内で、アプリケーションの成功は個々のコンポーネントの見事な連携に基づいています。カメラが検出した3Dデータは即座に、データが発生した場所で処理されて換算されます。Visionary-Tには、非常に性能の高いハードウェアと様々な特殊画像処理フィルタが備わっており、これらを使用して、暗色の、透明のまたは反射性の対象物の空間位置を確実に検出します。こうして正確に検出された対象物位置は単純な3D座標系で、毎秒最大50画像の速度で、遅滞なく機械制御装置に転送されます。
ここでのデータ処理は、カメラとPLCの接続が直接可能になるように行われます。その結果、特許取得済みのグリッパは、その効果を最大限に発揮できるようになります。こうして、インプリメンテーションの成功を受けて、製品の確実なシンギュレーションが簡単に実現するようになりました。
インテリジェントなインプリメンテーション
fpt ロボット工学社でプロジェクトリーダーと企業戦略を担当しているアンドレアス・フリック氏は、自社の事業分野を次のように見ています。「ロボットはとても大きな可能性を秘めています。しかしロボットはこれまで、柔らかくて曲がりやすいパーツの自動ハンドリングには使用されず、袋の検出も部分的にしか成功していませんでした。今回グリッパとカメラの完璧に調整された連携を実現させたことで、かつては完全に不可能であるとされていたロボットアプリケーションが製品になりました。」このコメントは、Subito Connectのようなロボットセルでの高速把持とプレーシングなどのアプリケーションを成功させて、良好な結果を得るには、小さなパズルピースが大量に必要であることを的確に示しています。SICKの従業員はこのプロジェクトでの共同作業の枠内で、カメラ技術の提供を通して、インテリジェントなシステムの実現に対して重要な貢献を果たすことができました。しかしながら、fpt ロボット工学社の従業員と共に考え続けて一緒に仕事をしたことが、今回の成功を特に良く表しています。両社はこれをベースにさらに共にステップアップしていく考えです。そのため近い将来においても、革新的なソリューションとグリッパのサクセスストーリーが必ず誕生するはずです。

