LIDAR Sensörlerde Ölçüm Düzeltmeleri Nasıl Yapılır?
11.Oca.2023
Her ölçü aleti doğası gereği ölçüm hatalarına sahiptir. Bunlardan bazıları doğrudan cihazların üzerinde veya teknik dökümanlarında önceden belirtilmiştir. Bazı ölçüm sorunları ise bulundukları ortama göre ortaya çıkabilmektedir.
LIDAR sensörlerin de kullanıldıkları ortamlara ve yüzeylere göre topladıkları ölçüm değerleri değişebilmektedir. Örneğin, siyah, parlak, saydam veya metalik yüzeylerde kullanılan LIDAR sensörlerde modeline ve teknolojisine göre farlılık olsa da ölçüm sonuçlarında hatalar ortaya çıkabilmektedir. Bu ölçüm hatalarının sensörün kalitesi hakkında tek başlarına bir değerlendirme parametresi olmamalıdır. Sensörün kalitesini belirleyen etken, bu tipte sorunlar ile nasıl başa çıktıklarıdır. Bu durumlara karşı ne gibi çözümler önerdikleridir. Bu çözümlere filtreler denir.
LIDAR Sensörler Hangi Filtreleri Kullanırlar?
LIDAR sensörlerde kullanılan cihaz modeline göre değişiklik göstermekle beraber, sizlerle SICK LIDAR sensör ailesinin sahip olduğu temel filtreleri paylaşacağız.
- Echo / Eko
- Particle (Partikül)
- Mean /Avarage (Ortalama)
- Median (Medyan)
Eko (Echo) Filtre Nedir?
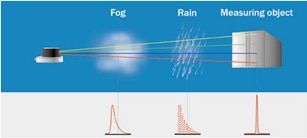
LIDAR sensör ile hedeflenen obje arasında bir cam olduğunu düşünelim. LIDAR sensörden gönderilen bir pulse’lik sinyalin bir kısmı cam üzerinden ilk yansıma olarak geri dönerken, diğer kısmı da camı geçerek objeden geri yansıyacaktır.
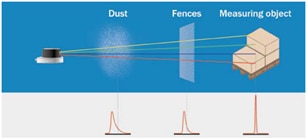
Veya bu katı bir obje değil, herhangi bir nesnenin (yağmur, kar tanesi vb.) lazer spotun sadece çok küçük bir kısmını kapsadığında da ışığın geri kalanı bu nesneyi geçerek hedeflenen objeye çarptığında çoklu eko’lara sebep olacaktır.
Yağmur, sis, kar ve toz gibi parazit faktörleri bir sensörün ölçümlerini etkileyebilir ve tüm sistemin kullanılabilirliğini önemli ölçüde azaltabilir. En yeni nesil SICK dış mekan lazer ölçüm sensörleri, olumsuz hava koşullarında bile daha yüksek hassasiyet ve ölçüm güvenilirliği ile çalışacak şekilde tasarlanmıştır.
Genel olarak, yağmur damlası veya engel gibi nesnelerden yayılan lazer ışını başına bir yansıma yankısı alınır. Yayılan her lazer darbesi için birkaç yankı alınmasıyla nesnelerin tespiti önemli ölçüde optimize edilmiştir. Bu teknoloji çoklu darbe süresi yöntemi olarak da bilinir.
Partikül (Particle) Filtre Nedir?
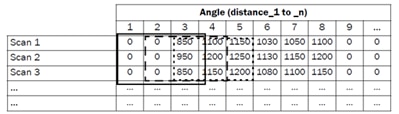
LIDAR sensör; gerçek açısal değeri, önceki ve sonraki açısal değerleri kontrol eder ve daha sonra gerçek değerin bu alana uyup uymadığını kontrol eder.
Örnekte, gerçek değer "5"tir. Tarayıcı etraftaki değerleri kontrol eder ve diğer tüm değerlerin "36 - 45" aralığında olduğunu fark eder => "5" buraya sığmaz. Bu nedenle tarayıcı bu gerçek değeri aynı taramada ancak bir önceki açısal adımda sahip olduğu değerle değiştirir. Belki bu da filtrelenmiş bir değerdir, ancak ortama uyan bir değer olacaktır.
Hesaplama ayrıca hesaplanan noktalar arasındaki ölçülen mesafelerini de dikkate alır. Gerçek hesaplanan değerin bir parçacık olarak kabul edilmesi için çevredeki değerlere olan uzaklığı 0,5 m'den büyük olmalıdır. Aksi takdirde tarayıcı filtreyi "kullanmaz".
Ortalama (Mean) Filtre Nedir?
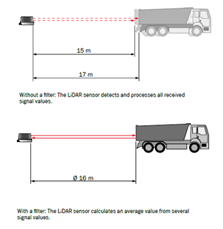
Ortalama filtresi, kullanımı esnasında LIDAR bir dizi tarama alır. Bu taramalar boyunca her açısal ölçüm noktası için ortalama değeri hesaplar ve daha sonra alınan bu ortalama değeri data olarak dışarıya verir.
Ortalama Değer Filtresi Ne Zaman Kullanılır?
- Düz olmayan yüzeylerde daha dengeli bir tarama çizgisi elde etmek için
- Sinyal/yansıma gürültülerinin etkilerini azaltmak için (ölçüm değerinde min. sapma)
- Veri kaybı olmadan ölçüm verilerini azaltmak için
Medyan (Median) Filtre Nedir?
Medyan filtresi, her ölçüm noktası için medyan çıktısı vererek tüm ölçüm hattı üzerindeki münferit uç değerleri azaltır.
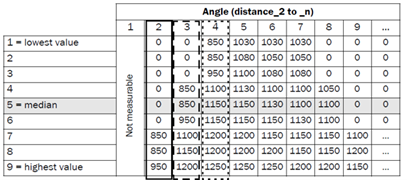
Kısaca bir tablo üzerinden özetlemeye çalışalım. LIDAR sensörün ardı ardına almış olduğu filtrelenmemiş değeri aşağıda görebilirsiniz.
Toplanan bu 9 değer artan bir şekilde sıralanırlar. Bu durumda 5. En yüksek değer bu taramanın medyan değeridir.
Medyan filtre, ortalama filtresi ile aynı değildir. Fakat ortalama filtre ile beraber kullanılması önerilmektedir. Bu sayede tekil aykırı değerler önceden filtreden geçilebilecek ve ortalama değerler için daha yakın değerler kalacaktır.
Lütfen biraz bekleyin...
Sorgunuz işleme alınmıştır ve birkaç saniye sürebilir.