Seçenekler çok fazla olduğu ve her seçenek farklı teknik spesifikasyonlara sahip olduğu için, bir güvenli lazer alan tarayıcı seçimi konusunda SICK uzmanlarının müşterilere danışmanlık hizmeti vermesi istenir. Müşterilerin “mümkün olan en büyük” koruma alanına sahip tarayıcıyı istemesi sıkça görülen bir durumdur. Bu makalede, mobil uygulamalarda tek önemli olan hususun bu olmadığını netleştirmeye çalışıyoruz.
Bağımsız endüstriyel araçlar için mükemmel koruma alanı boyutu
09.Şub.2021
Bir tarayıcının sunabileceği maksimum koruma alanı önemli bir özelliktir, fakat tarayıcının bağımsız endüstriyel araçlardaki bir uygulama için uygun olup olmadığı konusunda tek belirleyici kriter değildir. Aşağıda, güvenlik cihazlarınızın ve kontrolör sisteminizin tepki sürelerinin, gerekli bir koruma alanının boyutunu ciddi şekilde nasıl etkileyebileceği ve bunun doğrudan uygulamalarınız üzerinde nasıl bir etkiye sahip olduğu gösterilmektedir.
Bağımsız endüstriyel araçlarla ilgili uygulamalarda örn. ortam, fren sistemi, vb. gibi birçok şeyin dikkate alınması ve sistem tasarımcısının eksiksiz ve kapsamlı bir risk değerlendirmesi yapması gerektiği önemli bir noktadır. Bu makaledeki tüm bilgiler sadece kılavuz niteliğindedir ve olası tehlikeler hakkında bir çıkarımda bulunmak, tanımlanmayan tehlikeleri ortadan kaldırmak veya gerçek uygulamalarda bu tür tehlikelerle bağlantılı olarak tehlike derecesini belirlemek için kullanılamaz. Bu, bu cihazların tasarımcılarının/üreticilerinin sorumluluğundadır.
Güvenli lazer alan tarayıcının tarihçesi
1976 yılında SICK tarafından ilk 2. kategori alan tarayıcı “Optotrap”ın lansmanından itibaren güvenli lazer alan tarayıcılar otomatik sistemlerin geliştirilmesinde anahtar bir role sahiptir. 1994 yılında, SICK tarafından 3. kategorinin ilk güvenli lazer alan tarayıcısı pazara sunuldu. Bu cihazlar o zamandan beri daha verimli ve daha etkin bir üretim yapmaya olanak sağlıyor ve iş güvenliğinin arttırılmasına katkıda bulunuyor. Piyasadaki bununla ilgili etkileyici bir örnek olarak, güvenli lazer alan tarayıcıların tamponlar değiştirilerek daha yüksek bir sürüş hızına olanak sağladığı otomatik yönlendirmeli araçlardaki (AGV) uygulama gösterilebilir. Tampon, bir kontak sensörüdür ve zamanında tepki verebilmek amacıyla bir otomatik yönlendirmeli aracın yaralanmalara neden olmadan güvenli bir şekilde durabilmesi için, aracın yeterince düşük bir hızla hareket ediyor olması gerekir. Güvenli lazer alan tarayıcılar, çok önlerinde yer alan insanların ve engellerin güvenli bir şekilde temassız olarak algılanmasını sağlıyordu, bu sayede oldukça yüksek hızlarla hareket etmek mümkündü, bkz. Şekil 1.

Güvenli lazer alan tarayıcının tipi
Güvenli lazer alan tarayıcı, kendisine yönelik gerekliliklerin EN 61496-1 sayılı normda listelendiği 3 tipinde bir cihazdır. Bir güvenlik fonksiyonu 3 tipinde bir güvenli lazer alan tarayıcı kullanıyorsa, ulaşılabilen performans seviyesi (PL) veya emniyet seviyesi (SIL), PLd (EN ISO 13849) veya SIL2 (IEC 62061) olur. IEC 61496-3 ile birlikte, güvenli lazer alan tarayıcılar için tanımlanan ve yansımanın dağılmasına tepki veren aktif optoelektronik koruyucu cihazlara (AOPDDR) yönelik özel gereklilikleri kapsayan bir teknik spesifikasyon da mevcuttur.
Bu sayede, bu cihazlar hem sabit hem de mobil uygulamalarda kullanılabilir ve koruma alanının içinde bir insanı, bir organı veya beklenmeyen bir engeli algıladığında bir makinenin veya aracın güvenli şekilde frenlenmesini veya durdurulmasını sağlayabilirler.
Yol-zaman-uçuş prensibi ile ölçümün çalışma prensibi
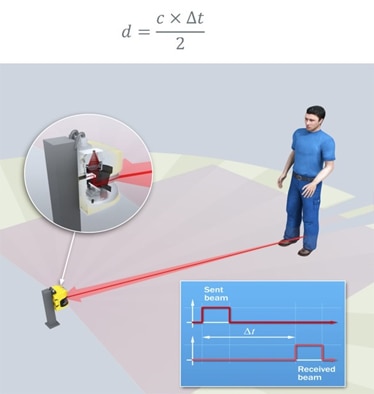
Güvenli lazer alan tarayıcılar, bir ışık palsinin aktarıldığı, yansıtıldığı ve ardından algılandığı yol-zaman-uçuş prensibi ile ölçüm prensibinden faydalanır. Nesne ile tarayıcı arasındaki mesafe (d), ışık huzmesinin geri dönüş süresi (ΔT) ve ışık hızı (c = 3 x 108 m/sn) yardımıyla hesaplanır, bkz. Şekil 2.
Tarayıcının içinde yer alan bir ayna, bu ışının döndürülmesini sağlar ve bir düzlemdeki bir yarıçap etrafında ölçümler yapmaya olanak sağlar. Bu, tarayıcının ortamın bir profilini oluşturabileceği ve kumanda ünitelerinin, tarayıcı için güvenlik fonksiyonlarında kullanım amacıyla çıkışların açılabileceği ve kapatılabileceği çeşitli alanları yapılandırabileceği anlamına gelir. Bazı tarayıcılar, çok sayıda alanı eşzamanlı olarak değerlendirebileceği için çok sayıda güvenlik fonksiyonunda da kullanılabilir, bkz. Şekil 3.
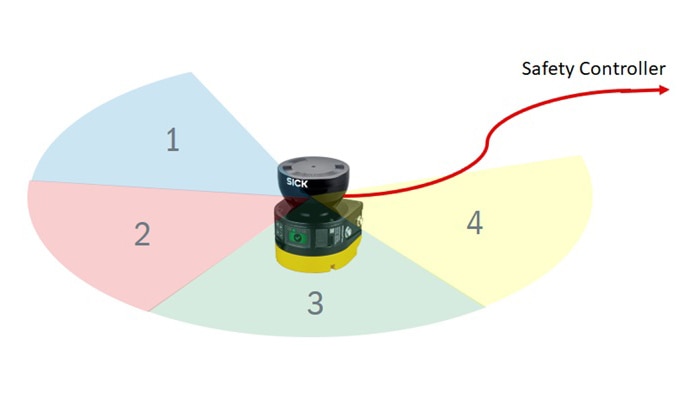
Eşzamanlı alan değerlendirmesi, anahtarlama çıkışları sadece bir veya iki adetle sınırlandığı için geçmişte zor olduğu bilinen karmaşık uygulamalara çözüm getirmeye olanak sağlar.
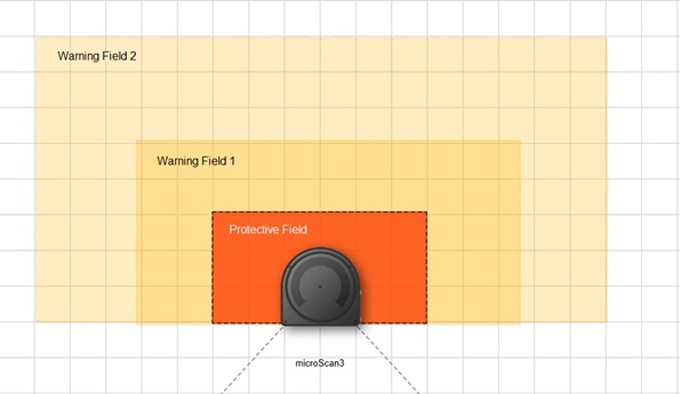
Alanların tipleri
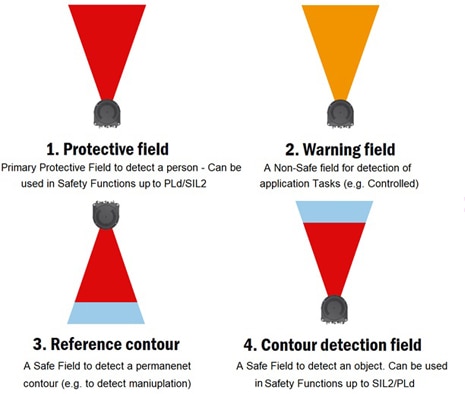
Bir güvenli lazer alan tarayıcı için öngörülen dört alan tipi mevcuttur, bkz. Şekil 4.
Ek olarak, bu alanlardan oluşan bir kombinasyon, bir “alan setine” eklenebilir, bkz. Şekil 5.
Güvenli lazer alan tarayıcılar, her birinin çok sayıda giriş koşulu temel alınarak seçildiği birçok alan setini kaydetme olanağına sahiptir. Bunlar, aşağıdaki formlarda ortaya çıkar:
• Kablo bağlantısı sabit olarak yapılmış girişler
• Yazılım Bit’leri
• Enkoderlerden gelen hız bilgileri
Hangi alan setinin seçileceğini belirleyen her koşul, alan setini ve giriş koşullarını içeren ve ayrıntılarına daha sonra değineceğimiz “Çoklu değerlendirme” gibi bilgileri de içerebilen “Denetleme durumu” olarak tanımlanır.
Bu noktada, denetleme durumları arasındaki geçişin, bir sistemin tepki süresini uzattığını belirtmek gerekir; bu nedenle, tepki süresini düşük tutmak için genelde eşzamanlı alan değerlendirmesi (bir alan setindeki birden çok koruma alanının eşzamanlı olarak gözlemlenmesi) kullanılmalıdır.
Çoklu değerlendirme
Bir nesnenin güvenli olarak tanımlanması için standart olarak bir güvenli lazer alan tarayıcının ilgili nesneyi arka arkaya iki kez (iki tur) algılaması gerekir. Bu, zorlu koşullarda ve tarayıcının algılama stabilitesi temel alındığında çok hassas olabilir ve kir, toz, kaynak kıvılcımları veya titreşim etkileri nedeniyle sorunlara yol açabilir. Çoklu değerlendirme, bir algılama sinyali oluşturulmadan önce bir nesnenin kaç kez algılanması gerektiğini belirleyen sayıyı ve bu da bir sistemin uygunluğunu önemli ölçüde arttırabilir. Örn. bir koruma alanı için, anahtarlama çıkışlarına iletilecek olan bir çoklu değerlendirme değeri 3 olarak yapılandırıldıysa, çıkışların KAPALI durumuna getirilmesi için bir nesnenin koruma alanında arka arkaya üç kez algılanması gerekir.
Ancak bu fonksiyonun kullanılması durumunda her ek tarama için toplam tepki süresi artacağından ve bu da otomatik yönlendirmeli araçlarla ilgili uygulamalarda olumsuz etkilere neden olabileceğinden bir taviz verilmesi söz konusudur.
Otomatik yönlendirmeli araçlar
Enkoderler bağımsız bir endüstriyel araca entegre edilirken, acil durdurma yerine güvenli bir hareket kontrolü uygulamak için hızı ölçmek mümkündür. Uyarı alanlarının yardımıyla, bir insanla veya nesneyle aradaki mesafeye bağlı olarak optimum uygunluk sağlanacak ve koruma alanının arkasına sadece nadiren geçilecek, yani aracın durması gerekmeyecek şekilde araçların yavaşlaması veya hızlanması sağlanabilir. Ancak araç, yaralanmaların önlenmesi amacıyla yeterince hızlı şekilde durdurulmalıdır.
Koruma alanları üretici tarafından belirlenmelidir. SICK, microScan3 güvenli lazer alan tarayıcılar için aşağıdaki denklemi sunar:
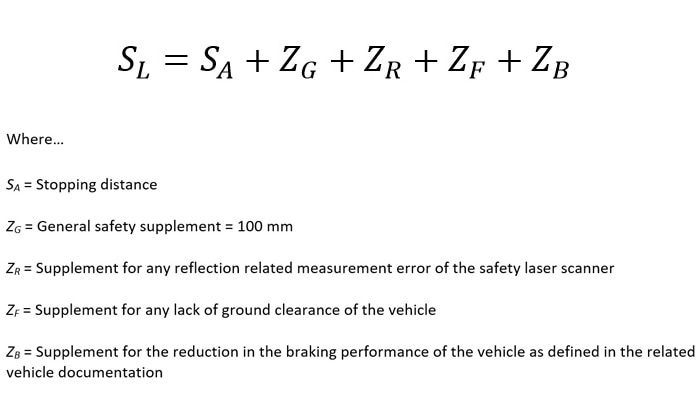
Tarayıcı, tepki süresi nedeniyle daha ileriyi görmek zorunda olduğu için, SL değeri arttıkça bağımsız endüstriyel aracınkapladığı alan da artar. Aşağıdaki nedenlerle SL değerinin mümkün olduğunca küçük tutulması önerilir:
• bağımsız endüstriyel araçların birbirlerine daha yakın çalışmasını sağlamak için
• çevrelerinde küçük bir boşluğa ihtiyaç duymaları için
• nesnelerin ve insanların aracın durmasına veya fren yapmasına daha nadiren neden olmaları için
• alanları daha küçük olan araçların daha hızlı hareket edebilmeleri ve uygunluklarını arttırabilmeleri için
Bunun için, uygulamayı optimize etmek üzere kontrol sistemindeki her parametreyi incelemek gerekir, bkz. Şekil 6.

Bu zincirde, yukarıda listelenen parametreler arasında genelde en büyüğü ve bu zincirde en büyük değişiklik gösteren, aracın durdurma yolu olan SA değeridir. Durdurma yolu, güvenli lazer alan tarayıcının tepki süresi ile güvenlik kontrolörünün tepki süresi esnasında kat edilen yol olan aracın frenleme mesafesinden oluşur.
Durma süresi, aşağıdaki parametreleri kapsar, bkz. denklem:
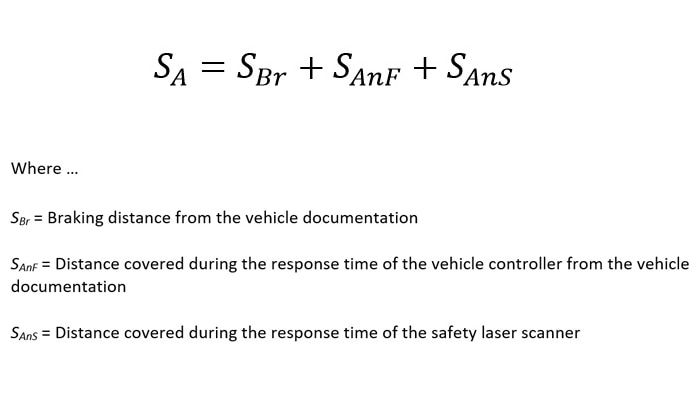
Frenleme mesafesi; örn. kullanılan frenlerin türü, bağımsız endüstriyel araçların kullanılacağı ortam, yük, sürüş yönü, tekerleklerin durumu, vb. gibi bir dizi faktöre bağlı olabilir. Bu faktörler özenli bir şekilde dikkate alınmalıdır. Aracın, kontrolörün tepki süresi zarfında kat ettiği yol; güvenlik kontrolörü, mimari ve bağlantı yöntemleri göz önünde bulundurularak iyileştirilebilir. Güvenli lazer alan tarayıcının tepki süresi zarfında kat edilen yol, kullanılan tarayıcının temel tepki süresine ve bu bileşenin konfigürasyonuna bağlıdır.
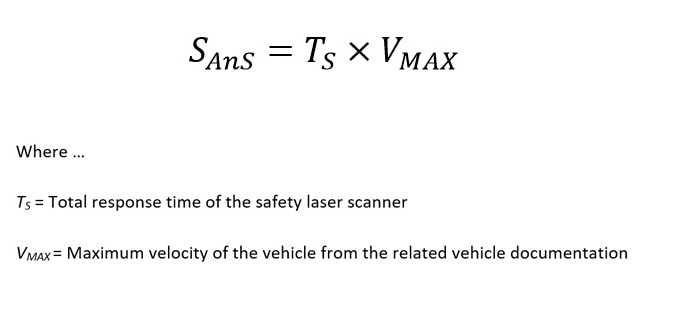
Güvenli lazer alan tarayıcının tepki süresi zarfında kat edilen yol
Güvenli lazer alan tarayıcının tepki süresi zarfında kat edilen yol, aşağıdakilere bağlıdır:
• Güvenli lazer alan tarayıcının temel tepki süresi
• Aracın maksimum hızı
• Çoklu değerlendirmeler, aktarma süreleri ve durum değişiminden kaynaklanan ek tepki süresi
Aşağıdaki denklemde bu duruma açıklık getirilmektedir:
Her farklı ortamı, her bağımsız endüstriyel araç sistemini, her güvenlik kontrolörünü, her tarayıcıyı ve bunun bağlantılarını değerlendirmek imkânsız olurdu ve değerin test verilerinden türetilmesi gerekirdi. Ancak burada, tarayıcının hızlı şekilde devreye girmesi ve çoklu değerlendirmelerin düşük tutulabilmesi durumunda, bunun, sistemin toplam tepki süresi üzerinde doğrudan bir etkisi olduğu gösterilmektedir. Bu, gereken koruma alanının boyutunu doğrudan etkiler. Pratikte bu, bazı durumlarda koruma alanında 10 m’ye kadar ve daha fazla farklılıklara yol açabilir. Yönetim sistemine aktarma sürelerinin düşük tutulması da önemlidir. Bu, çeşitli şekillerde sağlanabilir; güvenli çıkış sinyalinin güvenlik kontrolörlerindeki girişlerle sabit bir şekilde kablo bağlantısı yapılarak veya birden çok koruma alanının eşzamanlı olarak denetlenmesi için “anlık alan değerlendirmesi” ile güvenli iletişim yoluyla.
Sonuç: Bu şekilde mükemmel koruma alanı boyutu elde edilir
Koruma alanı, uygulama için uygun olmalıdır. Ancak mobil uygulamalarda, hatalı tetiklemeleri önlemek amacıyla ve araçların yer ihtiyacı nedeniyle mümkün olduğunca küçük tutmak avantajlıdır. Bu nedenle hem tarayıcının, hem de tüm sistemin tepki süresi dikkate alınmalıdır. Çok sayıda tarama, tarayıcının tepki süresini uzatabilir. Ayrıca, diğer her tarama için ne kadar ek tepki süresi gerektiğine dikkat edilmelidir. Bir tarayıcının algılama prensibi ne kadar sağlam ve güvenilir ise, karmaşık ortamlarda daha az çoklu tarama işleminin gerekmesi ihtimali o kadar fazla olur. Bu sayede, araçlar, yüksek hızla ve ortam konturlarına daha yakın konumda çalışabilir, bu da toplam verimliliği ve etkinliği arttırır ve kurulumun ayak izi küçültür. Bir tarayıcının bağlı olduğu kontrolör sistemi ve nasıl bağlanacağı da dikkate alınmalıdır. Karmaşık uygulamalarda eşzamanlı bir alan değerlendirmesi veya basit uygulamalarda sabit bir kablo bağlantısı, tepki sürelerini iyileştirebilir. Bir güvenli lazer alan tarayıcının sunabileceği maksimum koruma alanı boyutu önemli bir özelliktir, fakat koruma alanlarını mümkün olduğunca küçük ve aynı zamanda gerektiği kadar büyük tutabilmek amacıyla bağımsız endüstriyel araçlardaki uygulamalar için tüm tepki süresini ve algılama stabilitesini dikkate almak daha önemlidir.

Diğer katkılar





Martin Kidman
SICK (UK) Ltd. Makine Güvenliği Ürün Uzmanı
Martin Kidman, 2010 yılında Liverpool Üniversitesi’nde doktora yaptı ve 2006’dan beri endüstriyel otomasyon alanında çeşitli sensör üreticilerinde görev yaptı. 2013’ten bu yana SICK UK Ltd.’de endüstriyel güvenlik uygulamaları için makine güvenliği alanında ürün uzmanı olarak çalışıyor. Ayrıca sertifikalı bir Functional Safety Engineer (TUV Rheinland, #13017/16) unvanına sahiptir.

