Increasing product type diversity, more frequent model changeovers, quantity fluctuations: The changing market conditions call for suitable and competitive product solutions, for example precise 3D measurements at increasing speeds in flexible production processes. Zero tolerance, even in the case of the tiniest errors and irregularities, is the order of the day. In its SmartProduction Center in Augsburg, KUKA is employing the Ranger 3D streaming camera from SICK for order-specific visual inspection of the current assembly status.

Since March 2018, the Augsburg location has been running a pilot plant where car doors and wheel arches of a variety of automobile makes and models are being manufactured on the same line. This works on the principle of matrix production, whereby standardized production cells, all equipped with product-neutral basic functions, are expanded with product-specific tools depending on the order situation and batch size. Robots take the component delivered by an AGV and incorporate it using the appropriate technology. If you regard the matrix production as a closed system whose states are fully monitored and traceable, this system must be supplied at some location with the materials to be processed. It is precisely at this interface that it is necessary to ensure that the supplied components are delivered in the correct quantity, correct type, correct orientation, and in the required quality. The components pass through this interface by means of an AGV; a high speed camera checks based on reference characteristics whether the correct components have been loaded onto the AGV and whether they are OK.
No incorrect parts in the line thanks to fast 3D measurement and MultiScan
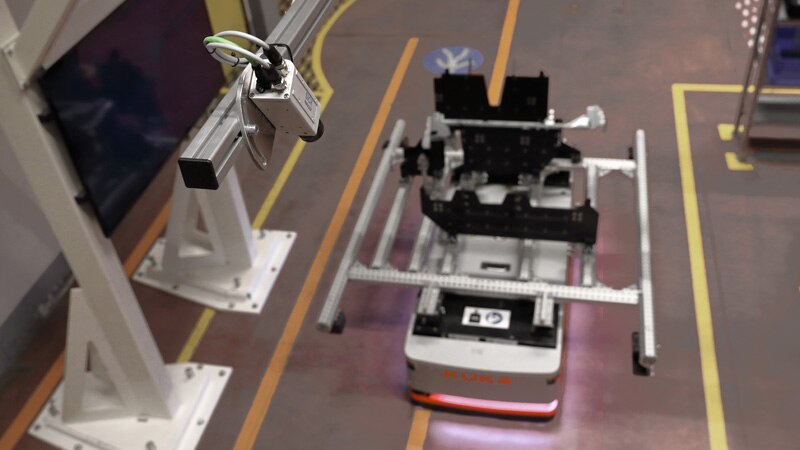
The AGV drives into the loading station of the warehouse; the worker is instructed by a “Pick by light and display” system which component to place in the component holder. He then starts the load inspection: The high speed camera from SICK passes over the component and transmits the geometry information via Ethernet to a central computer. The integrated HALCON image processing library creates a point cloud of the current loading situation which is then compared with the requirements. The data can optionally be uploaded to a KUKA cloud solution using the OPC UA communication protocol. The data pre-processing in the camera enables high measuring speeds to be achieved.
With a cycle rate of 30 kHz for 200 lines, the camera has no problem keeping up with the less than one minute cycle times in automotive construction and is currently the fastest 3D camera on the market.
“We have stringent requirements with regards to accuracy, resolution and process reliability. The Ranger 3D streaming camera from SICK can meet these requirements even for the large measuring volume of 4.20 m length, 2.20 m width and one meter depth that we require here”, describes Martin Eberl, a development engineer at KUKA. “It is not only necessary to be able inspect large components, but also detect small deviations like a double sheet situation, for example if the worker has mistakenly placed two components on top of one another. The camera therefore needs to reliably detect a height difference of 0.8 mm. Given these requirements, we searched for a camera with a height resolution better than 0.2 mm at a measuring volume of around 9 m³. Thanks to the flexible concept of the Ranger 3D streaming camera from SICK, we were able to implement an optimal setup for our application in terms of measuring range and measuring volume.
Fast 3D measurement and MultiScan for advanced industrial solutions
Ranger cameras offer high levels of flexibility and can be configured for a wide range of needs. With its fast 3D measuring speed, data quality, and flexible MultiScan functionality, it serves as a key image processing component in inspection systems worldwide. Ranger cameras extract the true 3D shape of an object, regardless of its contrast or color. It is used to measure object height and volume, to detect shape defects, and for quality grading and size sorting. With its MultiScan feature, a multitude of object features, such as contrast, gloss, and scatter can be measured at the same time! This enables reliable inspection results and more cost-efficient solutions since it only takes one Ranger to perform it all.
The detection of good/bad parts using an image processing sensor is the classic example of a binary assessment which, on the face of it, is in no way a pioneering solution for a smart factory. However, if the data collected from the sensor in the inspection process can be used to introduce concrete measures for preventing bad parts, then this will change the potential for added value and the benefits of the image processing solution immensely.
Flexibility and productivity working in harmony
Batch size 1 is a mechanical engineering challenge. Low quantities and individualized mass products are the key concepts of Industry 4.0. To make this a reality, a machine or plant must be able to handle variable product infeeds and adapt to different formats. Only then can goods be produced individually to suit customer needs right down to batch size 1, or adapted to suit fluctuations in demand as flexibly and efficiently as possible.
The KUKA SmartProduction Center is turning the adaptable and flexible matrix solution into a reality. It allows different products to be manufactured on one and the same plant, which is controlled by the AI-based KUKA smartProduction_control software, thereby making individualized production possible.
Read more:
Sensor intelligence in automotive production supports e-mobility
Sensor solutions for robotics:
Working together as equal - sensor solutions for robotics


