
사용자 친화적이고 유연한 부품 위치 결정용 센서 시스템
PLOC2D
표준 미들웨어 규격 ORiN으로 통신 가능
ORiN이란?
ORiN(Open Robot/Resource interface for the Network)은 공장 자동화 분야의 시스템을 위해 개발된 표준 미들웨어 규격입니다. 이 규격의 두 번째 버전인 ORiN2는 애플리케이션, 센서, 제어기, 데이터 스키마(표준 통신 프로토콜 포함)를 위한 표준 인터페이스를 제공합니다. 이 규격을 기반으로 만들어지는 프로바이더 모듈(확장 모듈)을 사용하면 다양한 장치에 표준화된 방법으로 액세스할 수 있습니다. 이로써 공장 내 IT 시스템의 재사용성과 신뢰도를 개선하고 시스템 개발 시간을 단축하고 더 빠른 구현을 달성할 수 있습니다.
로봇 제어기에서 ORiN 호환 애드인을 사용하면 공통 인터페이스 규격의 PLC, 카메라 또는 센서 같은 외부 장치를 사용할 수 있습니다. 이 애드인을 프로바이더라 부릅니다. SICK는 ORiN의 이점을 인식하고 광범위한 로봇 시스템용 센서 포트폴리오에 로봇 가이드 시스템 PLOC2D를 위한 첫 번째 프로바이더를 추가했습니다.
ORiN의 이점

최종 사용자가 얻는 이점:
- 제조사 독립적인 시스템 환경을 간단하게 만들 수 있음
- 생산 라인의 공정 감시와 원격 정비 가능

시스템 통합 설계자가 얻는 이점:
- 로봇 가이드 시스템 PLOC2D를 로봇 시스템에 간단하게 통합
- 표준 ORiN 인터페이스를 사용하여 빠르게 커미셔닝 가능
- ORiN 프로바이더(DDL 라이브러리)로 프로그래밍 부담 최소화

장치 제조사 및 OEM이 얻는 이점:
- 통신 인터페이스 및 테스트 개발 시 프로세스 단축
- 다른 제조사와 협업
솔루션 예
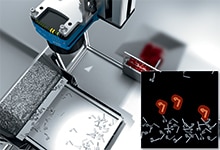
애니피더 내 부품 위치 파악
애니피더(AnyFeeder)는 역이송장치나 벨트 없이 소형 부품을 앞뒤로 이송합니다. 이때 소형 부품은 임의로 정렬됩니다. 로봇 가이드 시스템 PLOC2D가 그 위치를 신속하고 확실하게 감지한 후 ORiN 프로바이더를 이용하여 위치 데이터와 회전 상태를 로봇 제어기에 전달합니다. 표준화된 ORiN 인터페이스 덕분에 PLOC2D와 로봇 제어기 간 원활한 통신이 보장됩니다. 로봇은 획득한 정보를 이용하여 올바로 놓인 부품을 집어서 후속 프로세스에 공급합니다. 잘못 놓인 부품은 무시되며, 올바로 놓인 부품이 제거된 후 수직 펄스 진동에 의해 재정렬됩니다.
제품
로봇 가이드 시스템



눈높이 협력
로봇 비전, Safe Robotics, End of Arm Tooling 또는 포지션 피드백 등 어떤 과제도 문제없습니다. SICK 센서는 로봇에 정밀한 인지력을 부여합니다.
더 알아보기