Les codeurs incrémentaux sont des capteurs électroniques largement utilisés dans les applications industrielles pour le contrôle des mouvements rotatifs ou linéaires. Ils permettent de mesurer la distance, la position, la vitesse et ou encore l’accélération d'un objet. Ils sont particulièrement utiles dans les applications ou les mouvements doivent être pilotés avec précision, tels que les robots industriels, les machines-outils ou les équipements de test. Ils génèrent des incréments avec une précision élevée, ce qui en fait un choix populaire pour les systèmes de contrôle de mouvement. Dans cet article, nous allons explorer les caractéristiques, les avantages et les applications courantes des codeurs incrémentaux. Nous allons également comparer les codeurs incrémentaux et les codeurs absolus, pour aider les lecteurs à comprendre les avantages et les inconvénients de chaque type de capteur.
Codeur incrémental : Fonctionnement, applications et produits SICK

Qu’est-ce qu’un codeur incrémental ?
Définition
Les codeurs incrémentaux sont des capteurs électroniques fonctionnant généralement sur un principe rotatif utilisé pour la mesure et le contrôle de la vitesse ou de la position d'un objet en utilisant des signaux électriques.
Il existe deux types de codeurs incrémentaux :
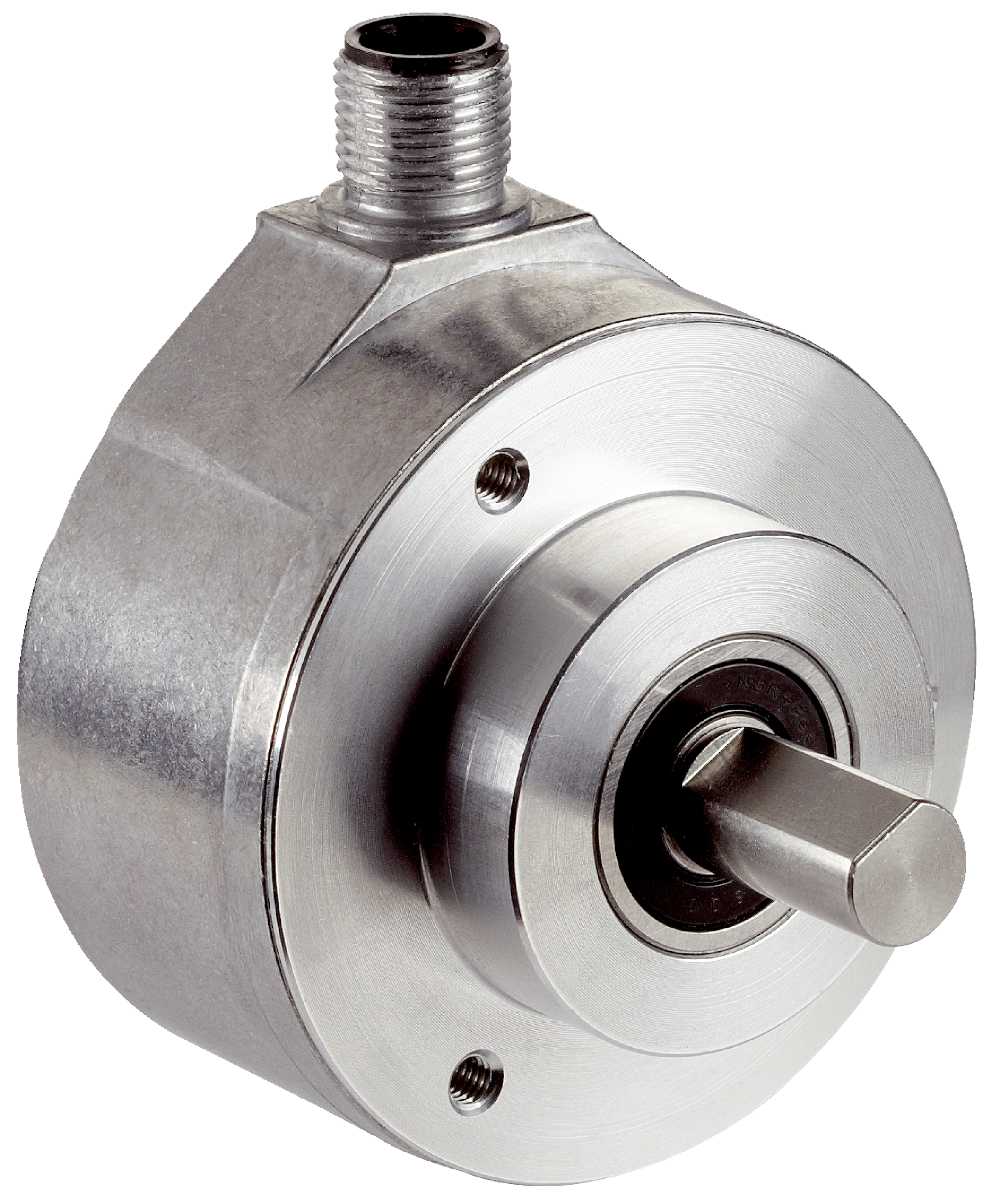
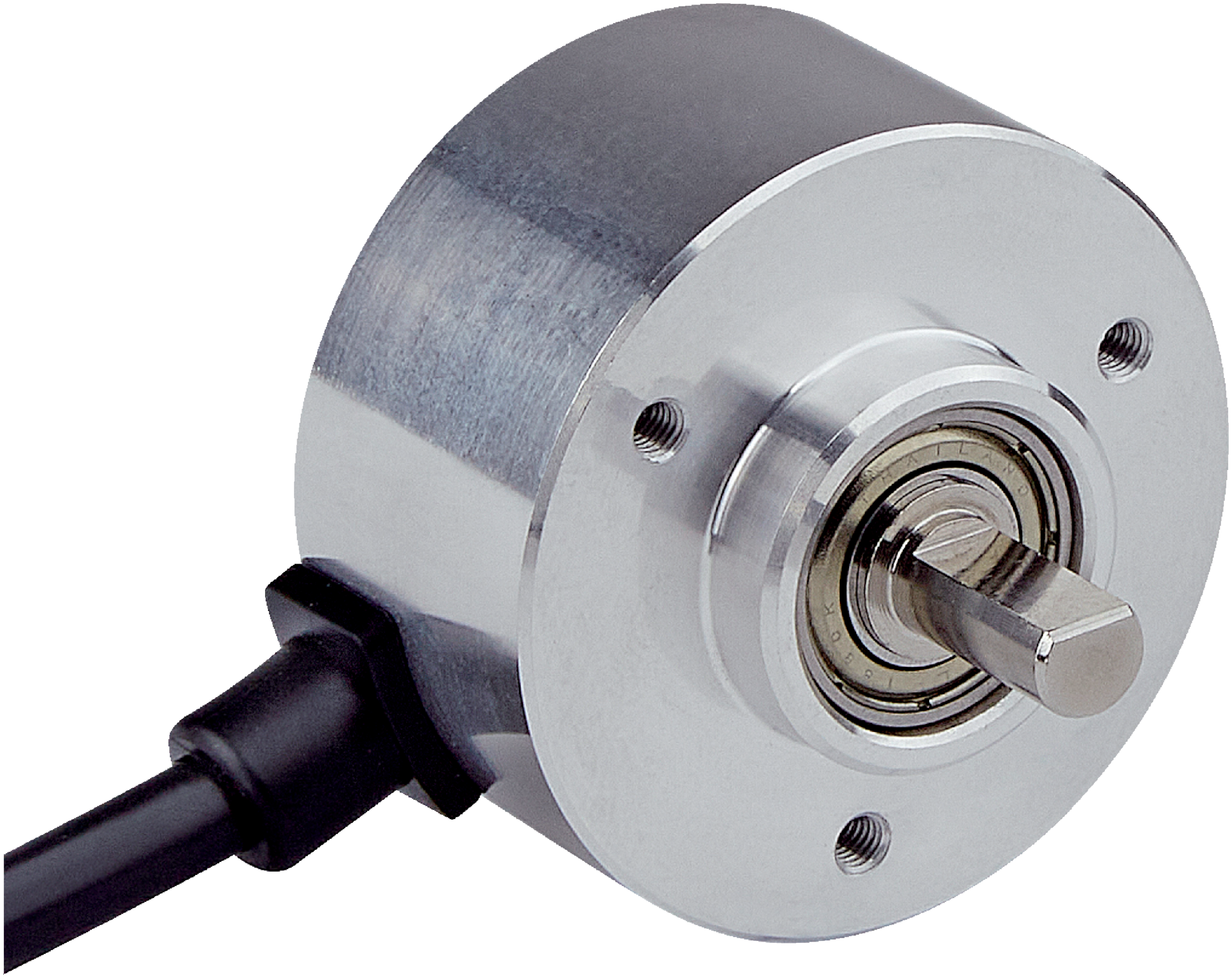
- Les codeurs à contacts, nécessitant un lien physique avec le mouvement et l’utilisation de roulements à billes pour capter le mouvement et le transformer en signaux électriques ;
- Les codeurs sans contact, reposant sur l’utilisation d’un aimant solidaire du mouvement d’un côté et d’une de la partie électronique dans un boitier séparé et fixe.
Loin d’être limité à la mesure de distance, les codeurs incrémentaux sont également utilisés pour mesurer la vitesse d'un objet en comptant le nombre de signaux électriques produits par le capteur par unité de temps (fréquence). Cela permet de contrôler la vitesse de mouvement d'un objet avec une précision élevée.
Les codeurs incrémentaux permettent également de mesurer la position angulaire d’un élément rotatif en comptant le nombre d’impulsions électriques générées par le capteur pour chaque incrément d'angle. Tout comme pour le contrôle de la vitesse, il est possible de contrôler la rotation d'un objet avec une précision élevée.
Quelle est la différence entre un codeur incrémental et un codeur absolu ?
Les codeurs incrémentaux et les codeurs absolus permettent la mesure de plusieurs variables, mais reposent sur des fonctionnements et des caractéristiques différents. Les codeurs incrémentaux génèrent des signaux impulsions électriques à chaque incrément de rotation ou de mouvement, tandis que les codeurs absolus génèrent un code unique pour chaque position absolue de l'objet.
En effet, les codeurs incrémentaux génèrent des impulsions électriques à chaque incrément de rotation ou de mouvement de l'objet, permettant ainsi une mesure précise de la distance, de la position ou de la vitesse de l'objet. Les signaux électriques transmis par les codeurs incrémentaux peuvent être utilisés pour :
- Contrôler la vitesse de mouvement d'un objet ;
- Compter les incréments de rotation ;
- Synchroniser des mouvements multiples ;
- Détecter des erreurs de mouvement.
Les codeurs absolus, quant à eux, génèrent un code unique pour chaque position angulaire de l'objet, c'est-à-dire qu'il donne une valeur absolue de position de l'objet sur 360°, plutôt que des incréments de position. Cela signifie que les codeurs absolus ne nécessitent pas un référencement initial avant de commencer à fonctionner et qu'ils conservent leur position même si l'alimentation électrique est coupée. C'est pourquoi ils sont utilisés dans les applications qui requièrent une valeur absolue de la position sans prise de référence préalable.
En d’autres termes, les deux types de codeurs permettent la mesure de plusieurs variables, mais reposent sur des fonctionnements et des caractéristiques différents.
Fonctionnement d’un codeur incrémental
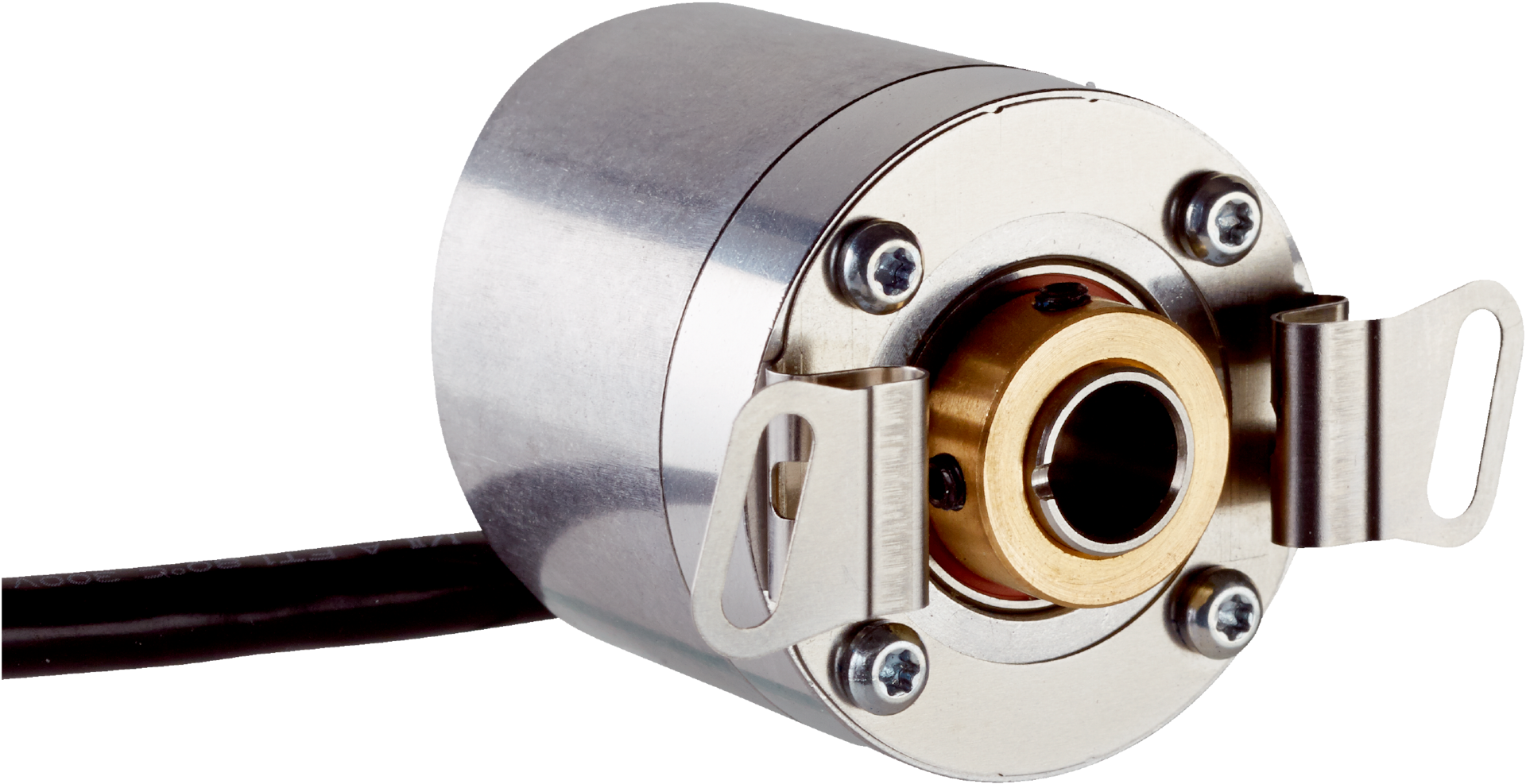
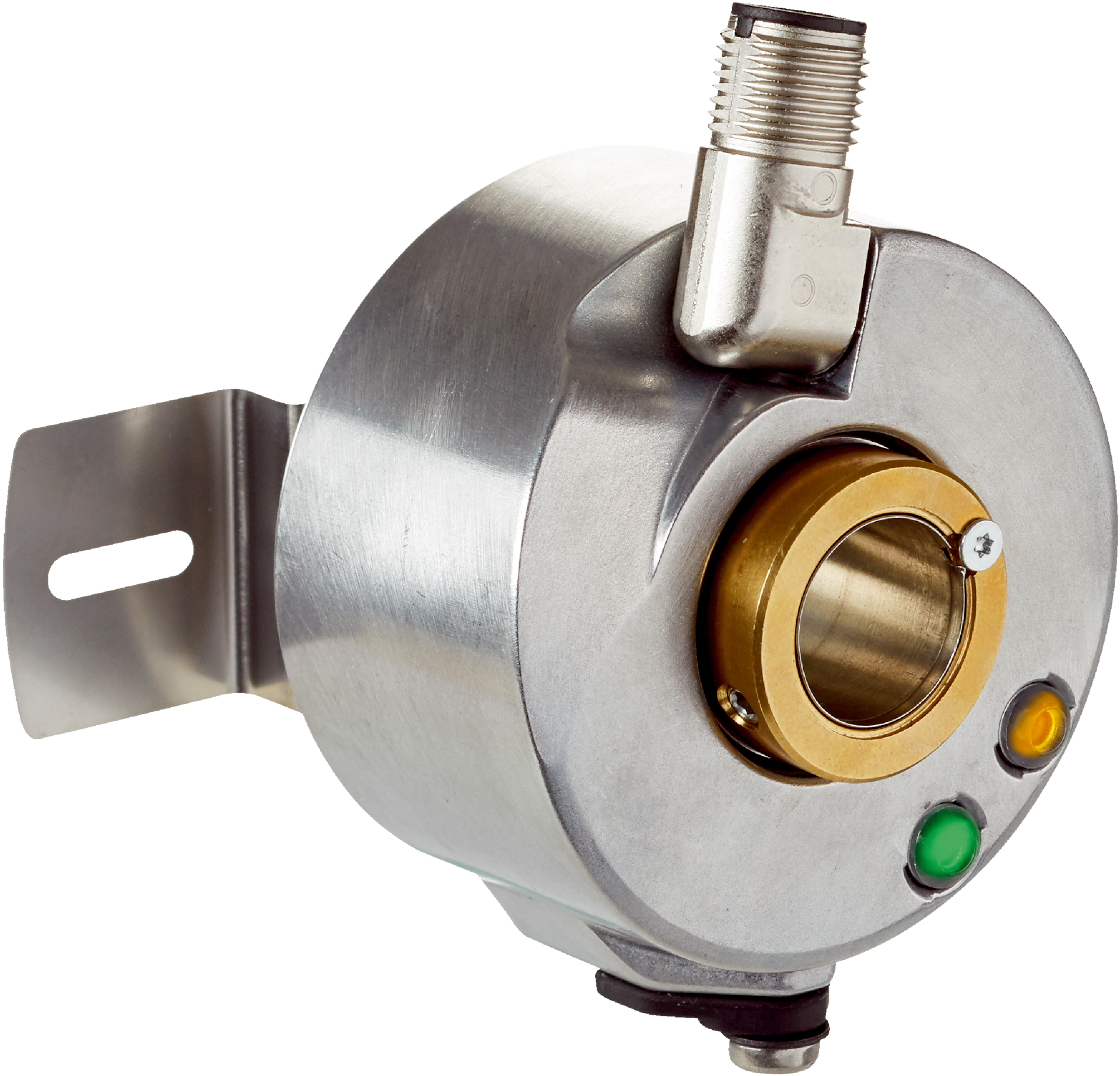
Composition du codeur incrémental
Les codeurs incrémentaux se composent généralement de deux parties :
- Un rotor (élément tournant), qui est relié à l'objet dont on souhaite mesurer la vitesse, la distance ou la position ;
- Un stator (élément fixe), qui contient la partie électronique de du capteur.
Dans le cadre d’un codeur à contact, le rotor est solidaire d’un disque ajouré, et le stator contient le système de lecture du disque ajouré. Lorsque le rotor tourne, les parties ajourées et pleines passent devant le système de lecture, générant ainsi les impulsions électriques qui peuvent être utilisées pour mesurer la vitesse, la distance ou la position de l'objet.
En ce qui concerne les codeurs sans contact, le champ magnétique de l’aimant permet de connaitre l’information de position entre le rotor et le stator et ainsi de générer les impulsions électriques correspondantes. Le rotor est équipé d’un aimant permanent, et le stator contient des capteurs à effet Hall qui détectent les variations de champ magnétique produites par la rotation de l'aimant et les transforment en signaux électriques pour les mesures de vitesse ou de position.
Critères de choix d’un codeur incrémental
Le choix d’un codeur incrémental repose essentiellement sur 4 points :
- La résolution : La résolution d'un codeur incrémental se rapporte au nombre de d’impulsions électriques générées par le capteur pour une rotation complète de 360° ou pour une valeur de déplacement linéaire. Plus la résolution est élevée, plus la mesure est précise. La résolution est généralement exprimée en nombre d’impulsions électriques par tour ou par unité de distance.
- L’interface de communication : Les codeurs incrémentaux proposent plusieurs types d’interfaces électriques. Les impulsions peuvent être sur une base 5V (appelée sortie TTL ou RS422) ou sur une base 24V (appelée sortie HTL ou Push/Pull). Le choix du type de sortie dépend de l’application et du type d’entrée au niveau de l’automate. Il est aussi possible de disposer d’une sortie sinusoïdale dite Sin/Cos. Plus rarement utilisée, elle présente des avantages dans certaines applications notamment ou il est nécessaire de vérifier la cohérence des signaux transmis par le codeur.
- La programmation : Certaines gammes de codeurs incrémentaux peuvent être programmées. Cela apporte une grande flexibilité et adaptabilité avec la possibilité de configurer divers paramètres tels que la résolution par tour, le type de sortie, etc….
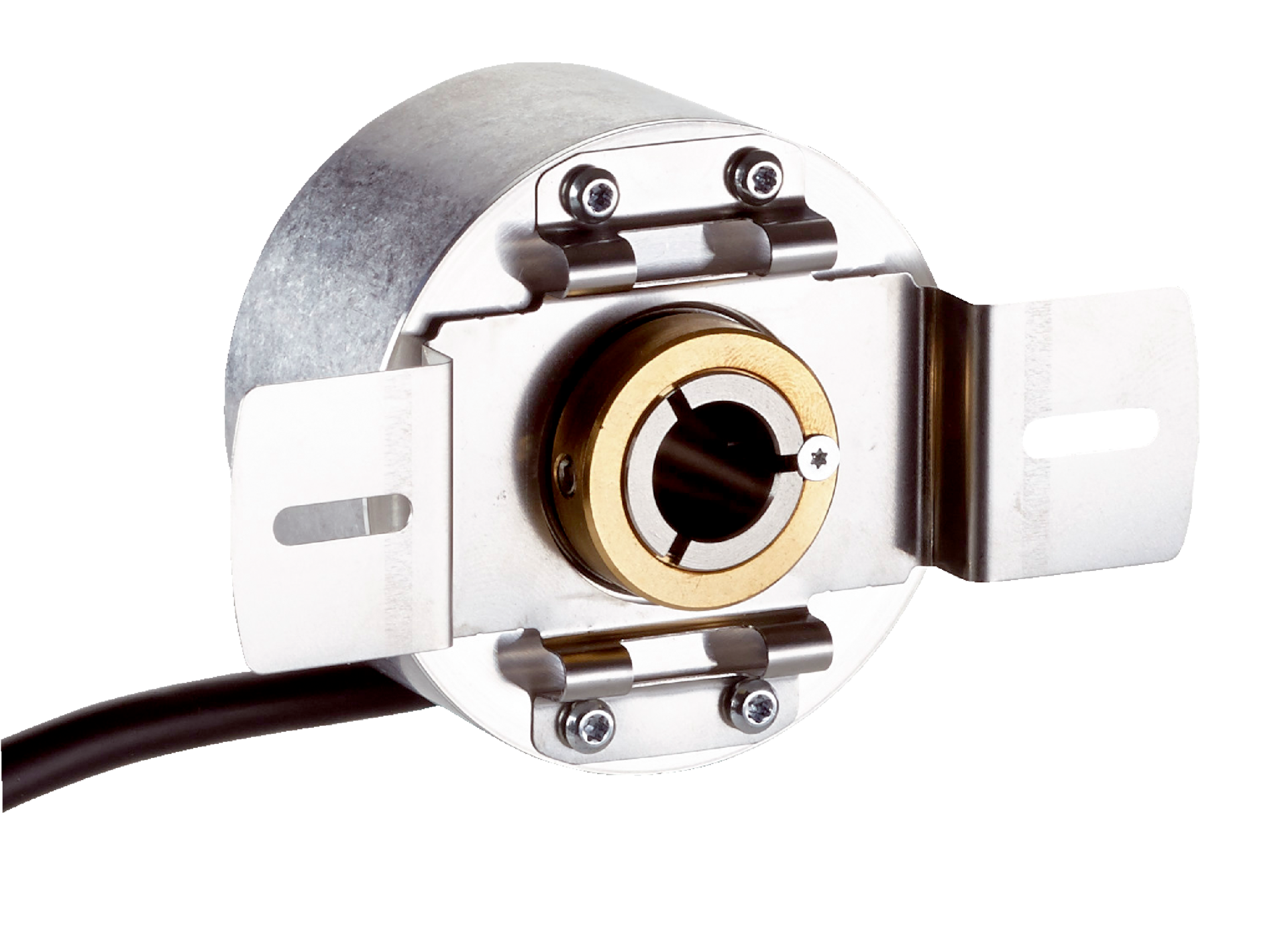
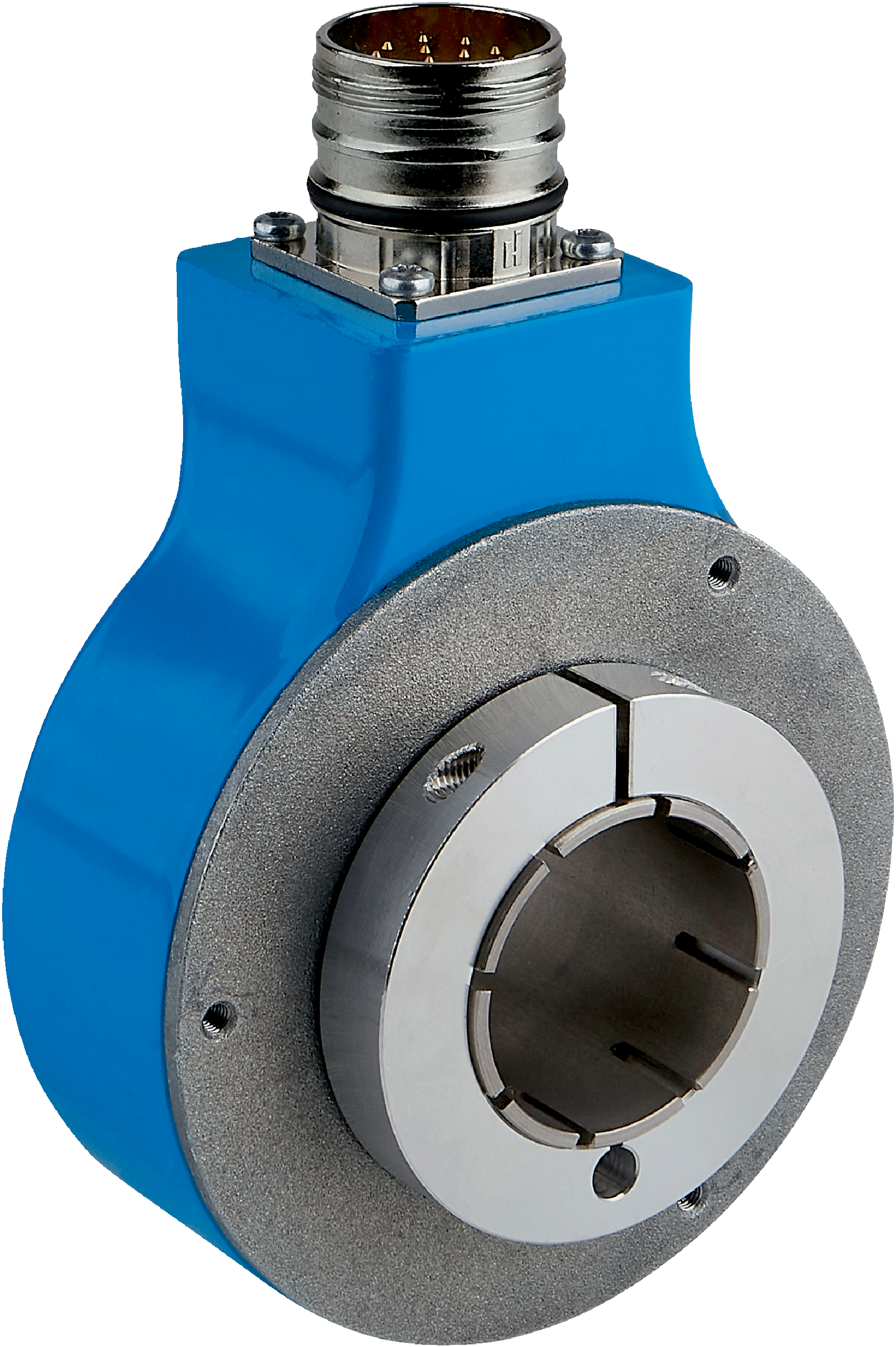
- L’interface mécanique : pour s’adapter à l’installation, aux caractéristiques mécaniques du moteur, les codeurs incrémentaux existent sous différentes formes : arbre creux, arbre plein, axe traversant ou non traversant…
Applications types du codeur incrémental
Comme évoqué précédemment, les codeurs incrémentaux sont utilisés dans une variété d'applications industrielles. Voici quelques exemples d'applications courantes :

Robots industriels : Les codeurs incrémentaux mesurent la position des articulations des robots industriels, permettant ainsi un contrôle précis de leur mouvement.

Machines-outils : Les codeurs incrémentaux sont utilisés pour mesurer la position de la tête de coupe des machines-outils, permettant ainsi un contrôle précis de la découpe des matériaux

Équipements de test : Les codeurs incrémentaux sont utilisés pour mesurer la distance parcourue par les éléments de test, permettant ainsi une analyse précise de la performance des produits

Équipements de levage : Les codeurs incrémentaux sont utilisés pour mesurer la position de la charge, permettant ainsi un contrôle précis de la manutention des charges.

Équipements de transport : Les codeurs incrémentaux sont utilisés pour mesurer avec précision la vitesse et la direction des systèmes mobiles automatisés.

Équipements de production : Les codeurs incrémentaux sont utilisés pour mesurer la position et optimiser les vitesse de déplacement de la navette dans la production, permettant ainsi une amélioration de la productivité.

Systèmes de contrôle de mouvement : Les codeurs incrémentaux sont utilisés pour mesurer la position des éléments en mouvement, permettant ainsi un contrôle précis de la vitesse de la synchronisation des éléments.
En résumé, les codeurs incrémentaux sont utilisés dans une variété d'applications industrielles pour mesurer la distance, la position, la vitesse et la rotation d'un objet, permettant ainsi un contrôle précis et une analyse précise de la performance des équipements et des produits.
Comment choisir son codeur incrémental SICK ?
Avec sa large gamme de famille de codeurs incrémentaux, SICK a forcément le bon produit pour votre application. A travers notre site internet, vous pourrez, à l’aide d’un moteur de recherche performant basé sur les critères techniques dont vous avez besoin, trouvez le codeur incrémental qui répondra parfaitement à vos applications. C’est simple, rapide et confortable…. En quelques clics, la configuration est faite et les produits correspondants apparaissent.

Conclusion
En conclusion, les codeurs incrémentaux sont des capteurs électroniques largement utilisés dans les applications industrielles pour mesurer la distance, la position, la vitesse et la rotation d'un objet. Ils permettent une mesure précise de l'incrément de position ou de rotation, ce qui en fait un choix populaire pour les systèmes de contrôle de mouvement. Les codeurs incrémentaux peuvent utiliser différentes interfaces de communication pour transmettre les signaux électriques à une unité de contrôle, il est important de choisir l'interface qui convient le mieux aux besoins de l'application. La résolution est un autre facteur important, elle définit le nombre de d’impulsions électriques générées par le capteur pour chaque rotation ou pour chaque unité de mouvement linéaire. Plus la résolution est élevée, plus la mesure est précise. En résumé, les codeurs incrémentaux sont des outils précieux pour nombres d’applications industrielles qui nécessitent une mesure précise et fiable de la distance, de la position, de la vitesse et de la rotation d'un objet.
Ces articles pourraient vous intéresser

L'automatisation dans l'intralogistique : Perfectionner le chariot élévateur automatisé

