
Helppokäyttöinen ja joustava anturijärjestelmä osien lokalisointiin
PLOC2D
Viestintä mahdollista middleware-vakiomäärityksen ORiN avulla
Mikä ORiN on?
ORiN (Open Robot/Resource interface for the Network) on middleware-vakiomääritys, joka on kehitetty tehdasautomaatiojärjestelmiin. Tämän määrityksen toinen versio, ORiN2, tarjoaa vakioliitännän sovelluksille, antureille, ohjauksille ja tietojärjestelmille, vakiotiedonsiirtoprotokollat mukaan lukien. Liitäntämoduulit (laajennusmoduulit), jotka laaditaan tämän spesifikaation pohjalta, mahdollistavat erilaisten laitteiden standardoidun käyttömenetelmä. Näin saadaan parannettua IT-järjestelmien uudelleenkäytettävyyttä ja luotettavuutta tehtaalla, lyhennettyä järjestelmän kehittämisaikaa ja nopeutettua implementointia.
Robottiohjauksessa käytetään ORiN-yhteensopivia lisäosia, niin että ulkoisia laitteita, kuten ohjelmoitavaa logiikkaa, kameroita tai antureita voidaan käyttää yhteisellä liitäntämäärityksellä. Näitä lisäosia nimitetään palveluiksi. SICK on huomannut ORiN-palveluiden edut ja täydentänyt kattavaa robotiikan antureiden valikoimaansa ensimmäisellä PLOC2D-robottiohjausjärjestelmän palvelulla.
ORiNin edut

Loppukäyttäjille:
- Helposti laadittava, valmistajasta riippumaton järjestelmäympäristö
- Mahdollisuus prosessien valvontaan ja tuotantolinjan etähuoltoon

Järjestelmäintegraattoreille:
- PLOC2D-robottiohjausjärjestelmän yksinkertainen integrointi robottijärjestelmään
- Vakio-ORiN-liitäntä takaa nopean käyttöönoton
- Erittäin vähäinen ohjelmointitarve ORiN-palvelun (DLL-kirjastojen) ansiosta

Laitevalmistajille ja OEM-valmistajille:
- Prosessien lyhentäminen tiedonsiirtoliittymiä ja testejä kehitettäessä
- Yhteistyö muiden valmistajien kanssa
Ratkaisuesimerkkejä
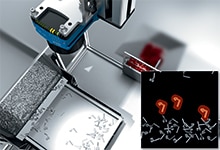
Osapaikannus anyfeederissä
Anyfeeder siirtää ja kääntää pienosat ilman paluuohjausta tai kuljetinhihnojen käyttöä. Tällöin pienosat suunnataan mielivaltaisesti. PLOC2D-robottiohjausjärjestelmä tunnistaa nopeasti ja varmasti niiden paikan ja välittää ORiN-palvelun avulla paikkatiedot ja kääntöasennot robottiohjaukselle. Standardoitu ORiN-liitäntä takaa moitteettoman viestinnän PLOC2D:n ja robottiohjauksen välillä. Kerätyillä informaatioilla robotti voi tarttua oikein sijoittuneisiin osiin ja siirtää ne seuraavaan prosessiin. Väärin sijoitetut osat jätetään huomiotta ja sijoitetaan uudelleen oikein sijoittuneisiin osiin tarttumisen jälkeen pulssimaisilla vertikaaliheilahduksilla.
Tuotteet
Järjestelmäratkaisut



Tasavertaista yhteistyötä
Onpa sitten kyseessä Robot Vision, Safe Robotics, varrenpääasennukset tai sijaintipalaute – SICKin anturit auttavat robottia havaintojen tarkentamisessa.
Lisätietoja