






Robottiohjausjärjestelmä kappaleiden 3D-paikantamiseen kuormatelineissä
PLR
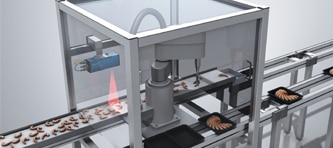
Robotin näkökenttää suurentavat kamerapohjaiset ratkaisut tulevat yhä enemmän esiin. SICKin kamera- ja konenäköteknologian ansiosta robotti paikantaa ja tunnistaa esimääritetyt kohteet ja päättää itsenäisesti, miten se tarttuu kyseiseen osaan. Mekaanisia lisärakenteita kuten kohdeohjauksia ei tällöin tarvita. Myös mittaukset ja laatutarkastukset ovat mahdollisia. Näin esimerkiksi liitosprosessin yhteydessä optiset valvontajärjestelmät tarkastavat tuotteiden paikan ja laadun ja harmonisoivat toiminnan kulun.
Robottisovellusten valikoima Robot Vision -järjestelmää varten
Tuotteemme ja ratkaisumme Safe Vision -toimintaa varten
Järjestelmäratkaisut


Joustava kappaleiden paikantaminen säiliöstä poimintaa ja lavojen purkua varten
PLB

Helppokäyttöinen ja joustava anturijärjestelmä osien lokalisointiin
PLOC2D
SICK AppSpace

Helppo poiminta hihnalta kaikilla mitoilla
3D Belt Pick
Teollinen kuvankäsittely

Liikkuvien osien konfiguroitavissa oleva, intuitiivinen ja luotettava 3D-tarkastus
TriSpector1000

3D-snapshot – monipuolisesti käytettävissä sisätiloissa
Visionary-T

Nopea ja joustava – tarkastustehtäviin, joissa toimintaetäisyydet ovat pitkiä
InspectorP65x

All-in-One-konenäköanturi, jossa joustava optiikka ja kestävä kotelo
InspectorP63x

Älykäs kuvankäsittely vaivattomassa anturipaketissa
Inspector

Räätälöidyt 3D-ratkaisut joustavaan automatisointiin
TriSpectorP1000

Ennen näkemätön 3D-teho pienessä kotelossa on mahdollista ROCC-tekniikan avulla
Ranger3

3D-snapshot – värikkäät näkymät tarkkaan tehdasautomaatioon
Visionary-S

Nopeasti korkeaan 3D-suorituskykyyn
Ruler3000

Tehokas 2D-konenäköanturi ahtaisiin tiloihin
InspectorP61x
Käytännön esimerkkejä – kertomukset SICK-anturiblogissa

Konenäköteknologia ohjaa yhteistoiminnallisia robotteja
Yhdessä SICKin konenäköteknologian kanssa Universal Robots -yrityksen yhteistoiminnalliset robotit huolehtivat tänä päivänä useista tehtävistä.

Universal Robots ja SICK matkalla tulevaisuuteen
Maineikkaan robottispesialistiyrityksen Universal Robotsin ja anturiratkaisujen johtavana tarjoajana toimivan SICKin yhteistyönä kehitettiin kaksi innovatiivista sovellusta yhteistoiminnallisia robotteja varten.

Onko sinulla kysyttävää?

Erityisiä ratkaisuja johtaville robottivalmistajille

We make Machine Vision Accessible
Customizable and easily configured 2D and 3D machine vision solutions – driven by SICK AppSpace

SICK puhuu nyt ORiNin kautta
Viestintä mahdollista middleware-vakiomäärityksen ORiN avulla