La suma de cada una de las piezas arroja una imagen perfecta. En este caso concreto, no se trata de un juego, sino de la colaboración profesional entre la empresa fpt Robotik, con sus nuevas pinzas patentadas, y SICK, con su cámara 3D Visionary-T. La empresa automatizada con éxito fpt Robotik ha desarrollado, con la célula Subito Connect A, una célula robótica completamente nueva para aplicaciones “pick & place”, cubriendo así el vacío en la preparación de pedidos basada en robots de productos flexibles y de forma inestable, en especial de bolsas de embalaje. Las pinzas de alto nivel tecnológico permiten separar y posicionar de forma cuidadosa productos no aptos para la succión y, hasta ahora, no automatizables. Para detectar con fiabilidad la posición de estos productos, se necesita un sistema de visión adecuado. Para ello, el fabricante de robots hace uso del Visionary-T AG. Tras poco más de un año de desarrollo de éxito y de apoyo intenso de SICK durante la implementación en la célula, el resultado es admirable.

La preparación de pedidos en un proceso automatizado de bolsas de embalaje de diferentes geometrías y contenido siempre ha supuesto un reto especial. La solución de fpt Robotik para detectar, agarrar y depositar con fiabilidad bolsas de embalaje es la célula Subito Connect A con la cámara 3D inteligente Visionary-T AG de SICK. La célula robótica, presentada durante la Automatica 2018 en Múnich, es compacta, puede utilizarse de forma flexible y móvil e instalarse sin gran esfuerzo en un puesto de trabajo manual, así como en un puesto de trabajo de la logística o de la preparación de pedidos. Como consecuencia, no es de extrañar que la solución tenga una gran aceptación en el mercado y que empresas destacadas hayan mostrado ya su interés por ella, entre ellas un importante fabricante alemán de juegos.
En la búsqueda de un socio competente para su sistema de pinzas basado en cámara, este no tardó en decantarse por SICK y sus productos Robot Vision. Con las diferentes variantes del Visionary-T, la empresa de “Sensor Intelligence.” ha lanzado al mercado una solución de cámara extremadamente competitiva. La cámara 3D es comparable con soluciones de instantánea 3D de otras empresas de la competencia, pero mucho más económica. No es de extrañar, por tanto, que la excelente relación prestaciones-precio fuera decisiva para tomar la decisión.

Agarre superlativo con 3D
En las aplicaciones “pick & place” de superficies flexibles y no aptas para la succión, en este caso concreto, al agarrar y depositar piezas de puzles embaladas, los pequeños detalles son determinantes. Es decir, solo numerosos pasos pequeños son capaces de poner en marcha con fiabilidad una aplicación compleja y complicada de este tipo. Solo cuando todas estas piezas se han combinado correctamente sale a la luz la imagen completa de una colaboración de éxito. Y, aquí, fpt Robotik y SICK, gracias a sus competencias y su experiencia, han logrado alcanzar un hito importante de la cooperación. La implementación del Visionary-T AG en la célula Subito Connect A fue posible gracias a la serenidad y la habilidad, a la perseverancia y la extraordinaria profesionalidad de todos los implicados de ambas partes. Durante poco más de un año de intensa colaboración, los empleados implicados desarrollaron la combinación descrita de pinzas y cámara hasta alcanzar la idoneidad para la producción en serie.
Combinación en la célula
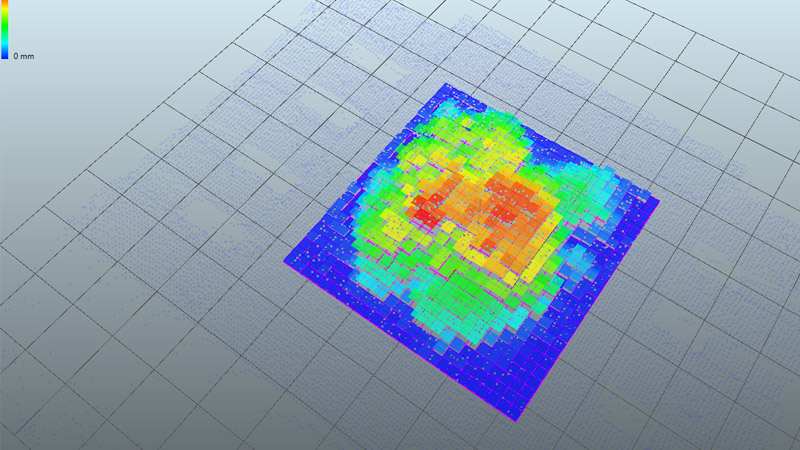
En la propia célula, el éxito de la aplicación se basa en la extraordinaria combinación de cada uno de los componentes. Los datos 3D registrados por la cámara se procesan y convierten de inmediato en el lugar mismo en el que se obtiene. Para ello, el Visionary-T cuenta con un hardware de alto rendimiento y con diversos filtros especiales de procesamiento de imágenes con cuya ayuda puede detectar con fiabilidad la posición espacial de objetos oscuros, transparentes y reflectantes. Las posiciones de los objetos determinadas así con precisión se transfieren a continuación sin demora al control de la máquina en coordenadas 3D sencillas con hasta 50 imágenes por segundo.
Aquí, los datos se procesan de tal forma que es posible la conexión directa de la cámara al control lógico programable. A continuación, las pinzas patentadas pueden desplegar todo su potencial. De este modo, la separación garantizada de los productos tras una implementación de éxito resulta increíblemente sencilla.
Implementación de inteligencia
El jefe de proyecto y estratega de la empresa, Andreas Frick, de fpt Robotik comparte la siguiente visión de su propia área de negocio: “Los robots son capaces de muchas cosas. Sin embargo, hasta ahora el uso de robots en la manipulación automatizada de piezas flexibles estaba descartado, y la detección de las bolsas tenía sus límites. Gracias a la combinación perfecta de pinzas y cámara, una aplicación robótica descartada categóricamente hasta ahora se ha convertido en un producto”. Esto describe bastante bien el hecho de que para que una aplicación tenga éxito, p. ej., las operaciones rápidas de agarrar y depositar en una célula robótica como la Subito Connect, son necesarias infinidad de pequeñas piezas para obtener un buen resultado. Durante la colaboración en este proyecto, los empleados de SICK hicieron una importante contribución a la inteligencia del sistema con la técnica de cámara aportada. Pero es ante todo la reflexión y el trabajo conjuntos con los colegas de fpt Robotik lo que mejor refleja el éxito obtenido. Algo que sienta las bases para futuras colaboraciones que permitirán, con seguridad, desarrollar soluciones innovadoras y cosechar éxitos.


