







La star de la technique d’entraînement : système Feedback-moteur avec HIPERFACE DSL®
EES/EEM37
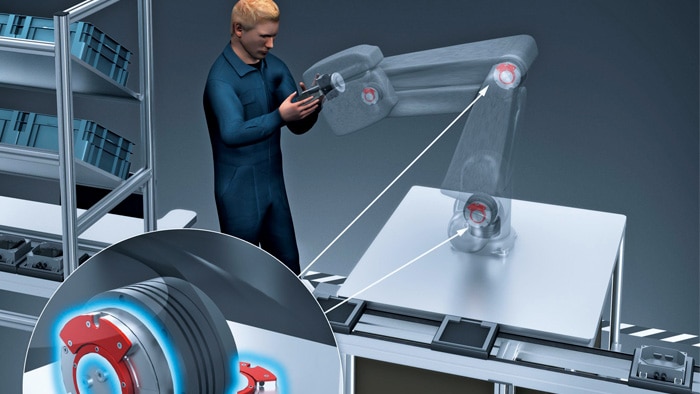
On en sait davantage au cœur du système. Dans le domaine de la robotique, les systèmes Feedback-moteur fournissent des données sur la vitesse et la position, ainsi que sur l’état des entraînements au régulateur et à la commande. Ils constituent ainsi la base sensorielle de tous les mouvements du robot. Ces capteurs de moteur intelligents de SICK sont au cœur du système et disposent des données nécessaires pour commander efficacement le robot et l’installation.
Choix d’applications robotiques pour feedback de position
Robot à bras articulé
La forme compacte du système Feedback-moteur EEM37 est adaptée à toutes les variantes de robot à bras articulé. La technologie HIPERFACE-DSL® permet de mettre en œuvre de nouvelles applications comme Safe Robotics pour une collaboration homme-robot optimale.
Robot SCARA
SEM70 est un système Feedback-moteur avec interface HIPERFACE® pour les grands couples moteur et moteurs à arbre creux. L’arbre creux permet de guider les câbles intérieurs du robot SCARA.
Robot linéaire (cartésien)
Les systèmes Feedback-moteur TTK50 et TTK70 fonctionnent selon un principe de mesure sans contact et ne sont donc pas confrontés à l’usure. Le système de mesure de longueur absolue rend les courses de référence superflues. Ce système est donc idéal pour les applications linéaires dans le cadre de longueurs de mesure de quatre mètres maximum.
Robot Delta
Du fait de leur compacité, les systèmes SKM/SKS conviennent aux applications très dynamiques comme avec les robots Delta. Toutes les variantes disposent d’une plaque signalétique électronique et d’une interface HIPERFACE®. Elles satisfont aux exigences de sécurité selon SIL2/PL d.
Nos produits et solutions pour le feedback de position




Exemples concrets – En savoir plus dans le blog sur les capteurs de SICK

Avec les capteurs Smart Motor de SICK, les robots HIWIN sont sûrs et prêts pour affronter les défis de l’avenir
HIWIN, fabricant de robotique et expert en technique linéaire, utilise les système Feedback-moteur de SICK dans son nouveau robot à six axes pour applications Pick-and-place. Cela permet de gagner de la place et le robot 5 kilogrammes est ainsi paré pour des applications collaboratives futures.

Avez-vous des questions ?

Des solutions spécifiques pour les constructeurs de robots leaders
HIPERFACE DSL® – La connexion numérique au futur

En savoir plus sur la technologie monocâble dans la technique d’entraînement


Les Smart Motor Sensors de SICK font de leurs utilisateurs des insiders.