A soma de todas as partes individuais resulta numa imagem perfeita. No caso concreto, não se trata de um jogo, mas do trabalho cooperativo profissional da fpt Robotik com o seu novo sistema patenteado de garras e a SICK da câmera 3D Visionary-T. A fpt Robotik, fabricante de sistemas de automação que alcançou grande sucesso, construiu a célula A Subito Connect, uma célula robotizada totalmente nova para aplicações pick-and-place, fechando assim a lacuna que havia na separação robotizada de produtos moles e de formato instável, principalmente embalagens em forma de sacos. Devido à técnica de agarrar, tecnologicamente muito exigente, produtos sem densidade para permitir uma aspiração e produtos até agora não automatizáveis, podem ser singularizados de modo preservador e posicionados. Para detectar a posição destes produtos de modo confiável, é necessário um sistema com “visão” adequada. Para isso, o fabricante de robôs se utiliza da Visionary-T AG. Depois de menos de um ano de desenvolvimento bem-sucedido e com o apoio intenso da SICK na implementação na célula, o resultado pode muito mais do que apenas se deixar ver.

Sempre foi um desafio separar embalagens tipo saco, com as mais variadas geometrias e conteúdos, num processo automatizado. A solução da fpt Robotik para a detecção confiável, agarrar e depositar embalagens tipo saco é a célula A Subito Connect com a câmera 3D inteligente 3D Visionary-T AG da SICK. A célula robotizada, apresentada ao público em Munique por ocasião da feira Automatica 2018,é compacta, flexível, de uso móvel e pode ser instalada sem muito trabalho num posto de trabalho manual bem como num posto de trabalho de logística ou de separação. Consequentemente, também não é de se surpreender que a solução encontrou uma aceitação muito positiva no mercado e empresas de renome já demonstram o seu interesse, dentre estes um grande produtor alemão de jogos.
Na busca por um parceiro competente para a técnica de agarrar baseada em câmera, a escolha recaiu rapidamente na SICK e seus produtos Robot Vision. Com as diferentes variantes da Visionary-T, a empresa levou ao mercado uma solução de câmera de concorrência muito boa para o "Sensor Intelligence." A câmera 3D é comparável com soluções 3D snapshot de outros concorrentes– porém muito mais barata. Desta maneira, também a boa relação preço-benefício foi decisiva para a decisão.

Agarrar com 3D com superioridade
Justamente no pick-and-place de superfícies moles e sem densidade para permitir o agarramento, no caso concreto ao agarrar e depositar peças de jogos de quebra-cabeças embaladas, muitas vezes a questão está nos detalhes. Isso quer dizer que muitos pequenos passos fazem uma aplicação tão complexa e tão complicada correr de modo confiável. Somente quando todas estas peças do quebra-cabeças forem juntadas de modo certo, resulta o quadro completo de um trabalho em conjunto bem-sucedido. Neste caso, a fpt Robotik e a SICK atingiram um marco de cooperação, graças às suas capacidades e aos seus especialistas. A implementação da Visionary-T AG na célula A Subito Connect obteve êxito graças à paciência e habilidade, persistência e profissionalismo extraordinário de todos os envolvidos de ambos os lados. Depois de quase um ano de intenso trabalho em conjunto, os colaboradores envolvidos conseguiram desenvolver a combinação descrita de sistema de garras e câmera até a maturidade confiável para produção em série.
Atuação conjunta na célula
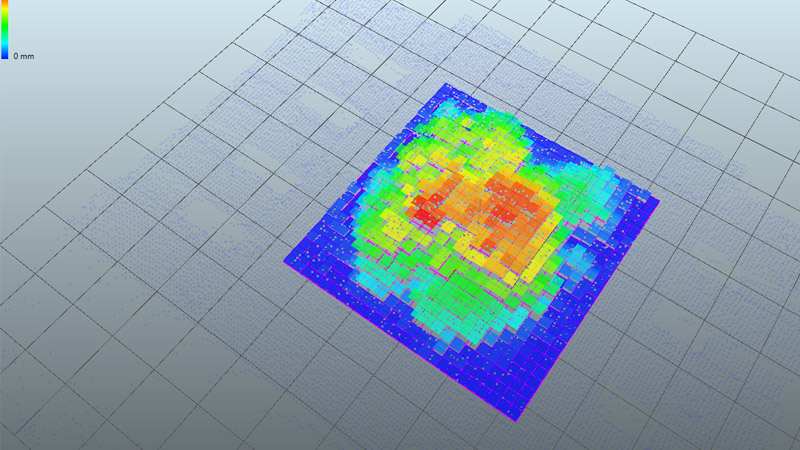
Na própria célula, o sucesso da aplicação está baseado na ação conjunta de cada componente individual. Os dados 3D coletados pela câmera são preparados imediatamente e convertidos ainda no local de seu surgimento. Para isso, a Visionary-T dispõe de um hardware de desempenho extremamente alto e diversos filtros de processamento de imagens especiais, com cujo auxílio ela detecta a posição de objetos escuros, transparentes ou muito refletivos dentro do espaço. As posições dos objetos tão exatamente determinadas são então transmitidas por ela diretamente ao comando da máquina, em simples coordenadas mundiais 3D com até 50 imagens por segundo.
Os dados são processados de modo que é possível a conexão direta da câmera ao CLP. Na sequência, o sistema de garras patenteado pode desdobrar todo o seu efeito. Deste modo, a singularização garantida dos produtos depois da implementação bem-sucedida é uma brincadeira.
Implementar inteligência
O gerente de projetos e estrategista da empresa Andreas Frick da fpt Robotik manifesta o seguinte ponto de vista a respeito do próprio campo de negócios: "Robôs conseguem fazer muita coisa. No entanto, o uso de robôs no manuseio automático de peças moles estava excluído até agora e a detecção de sacos só podia ser realizada de modo condicionado. Pela ação conjunta perfeitamente sintonizada entre o sistema de garras e a câmera, a utilização de robôs antes categoricamente excluída, tornou-se agora um produto." Isso descreve muito bem que, para uma aplicação bem-sucedida, por exemplo, agarrar e largar rapidamente dentro de uma célula robotizada, tal como a Subito Connect, é necessário um número imenso de pequenas peças do jogo de montar para atingir um bom resultado. No contexto do trabalho de cooperação neste projeto, com a introdução da técnica de câmera, os colaboradores da SICK puderam dar uma contribuição muito importante para a inteligência do sistema. Principalmente a continuação dos estudos e trabalhos com os colegas da fpt Robotik reflete este sucesso. Pretendemos edificar em conjunto neste sentido. Deste modo, certamente em futuro bem próximo surgirão soluções inovadoras e histórias de sucesso concretas.


